2. Hướng dẫn lắp ráp
2.1 Lắp ráp
Lắp bánh đa hướng
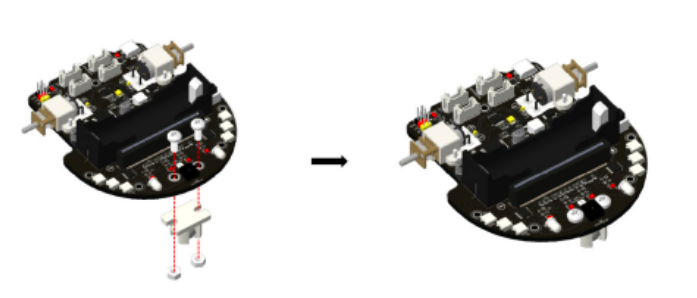
Lắp bu lông M3-10 và đai ốc M3 vào tắm mica dưới

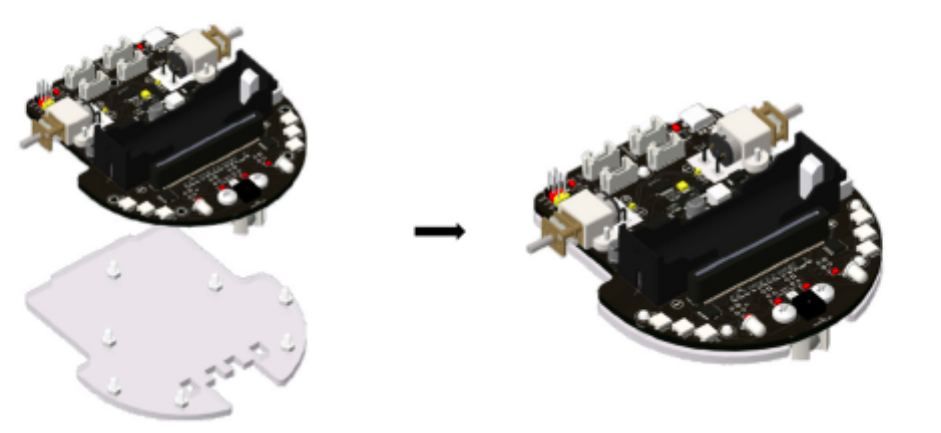
Lắp tấm mica dưới vào bo mạch chính
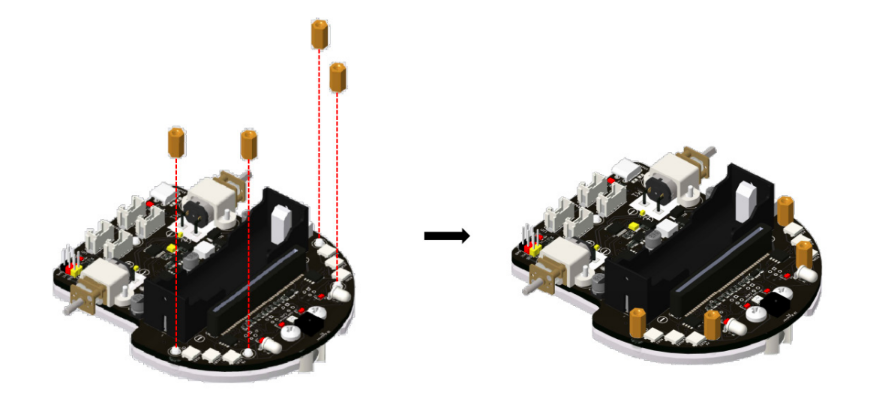
Lắp trụ đồng M3-10 vào 4 vị trí như hình
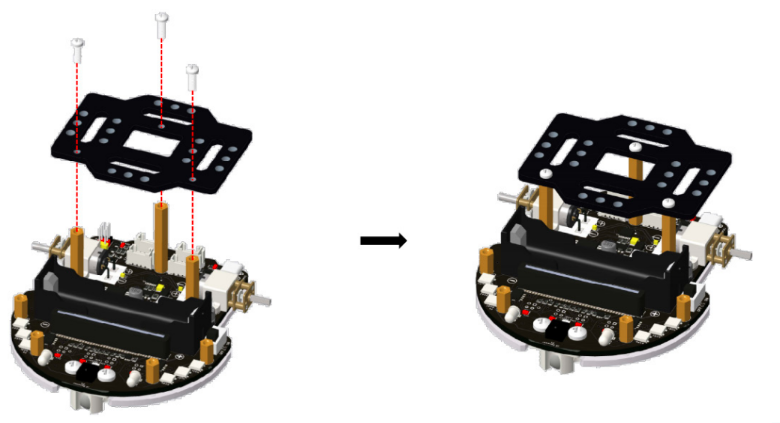
Lắp trụ đồng M3-30 vào 3 vị trí như hình

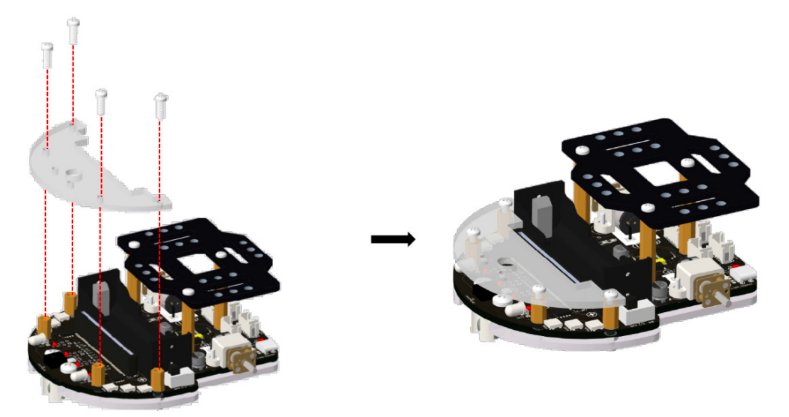
Lắp tấm mở rộng lên thân robot bằng bu lông M3-10
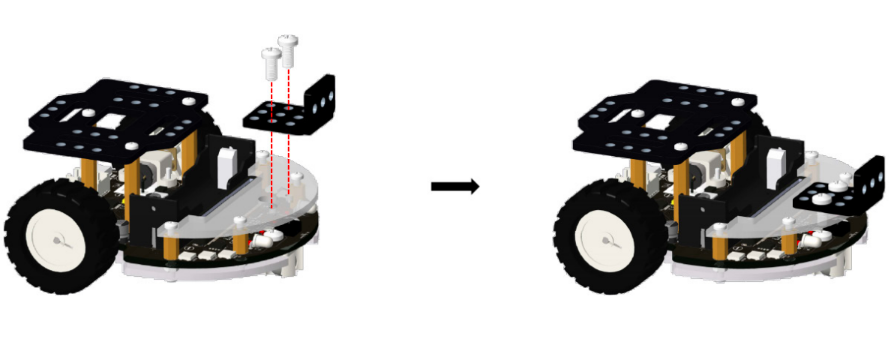
Lắp tấm sau vào mạch điều khiển ở vị trí như hình bằng bu lông M3-10
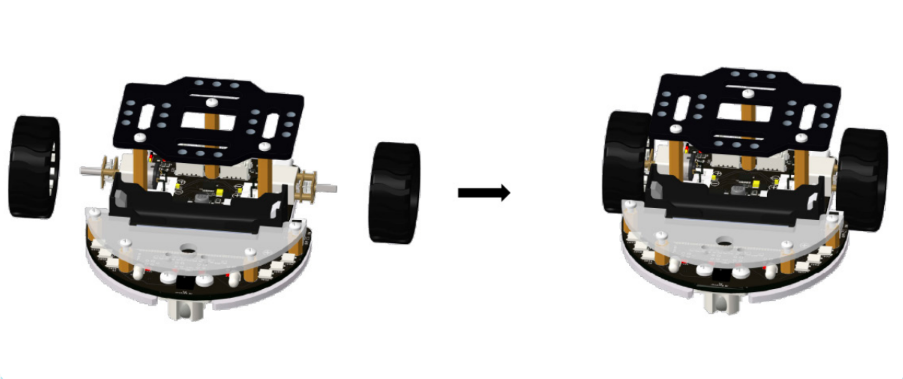
Lắp 2 bánh xe sau vào trục động cơ của robot
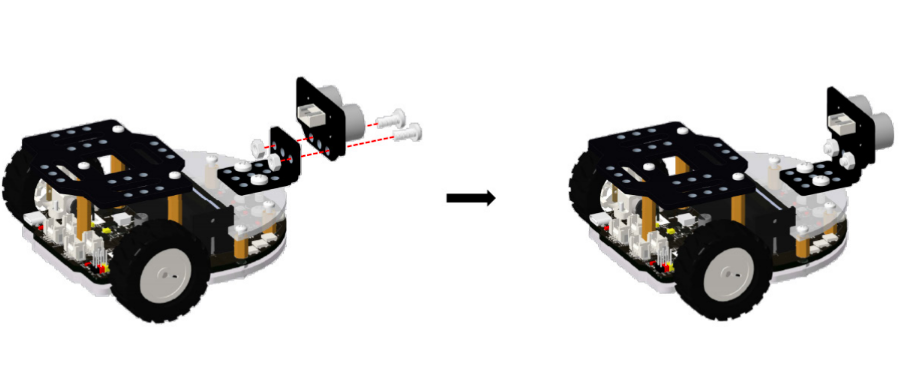
Lắp gá chữ L vào vị trí như hình bằng bu lông M4 -10
Lắp cảm biến siêu âm vào vị trí như hình bằng bu lông M4-10 và đai ốc M4
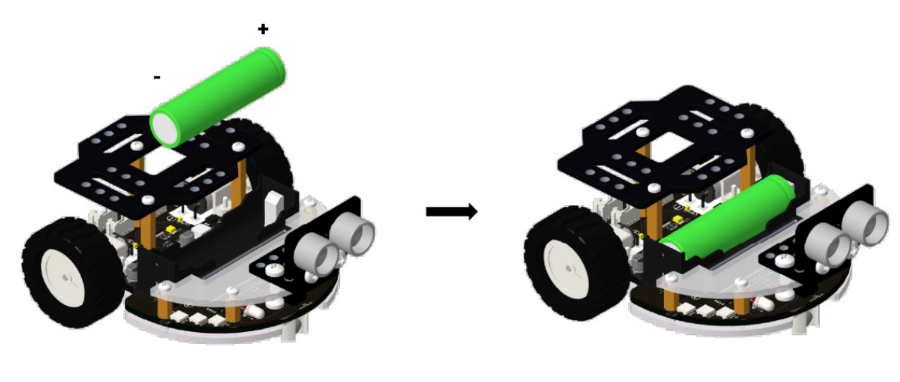
Lắp pin vào vị trí như hình. Chú ý lắp pin đúng cực tránh hư hỏng robot
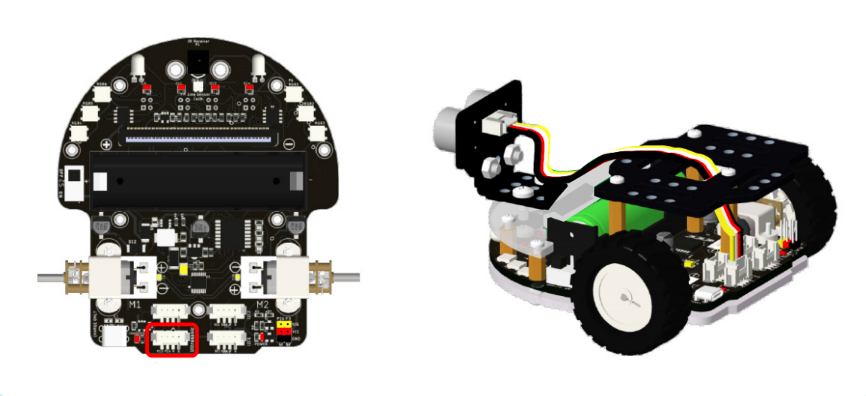
Lắp dây tín hiệu nối cảm biến khoảng cách với mạch điều khiển tại vị trí như hình
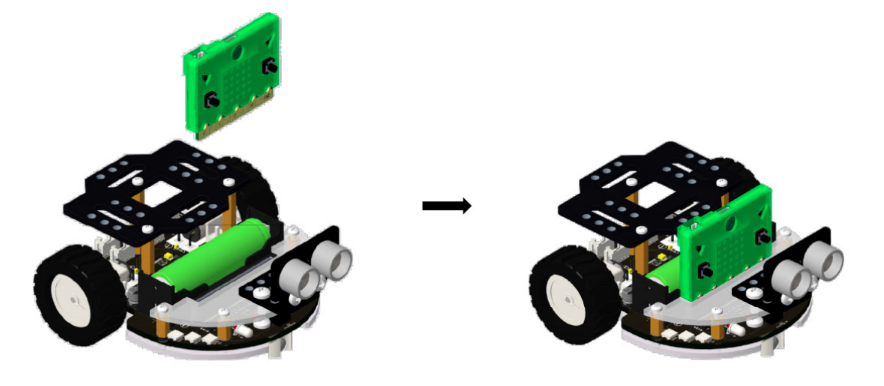
Lắp máy tính lập trình Yolo:Bit vào robot
2.2 Hướng dẫn sạc pin
Pin trên rover
Pin dùng cho Rover là pin sạc Li-ion 3.7V, có thể sạc được. Khi lắp vào robot Rover bạn cần để ý lắp đúng cực để tránh gây hư hại robot
Sạc pin
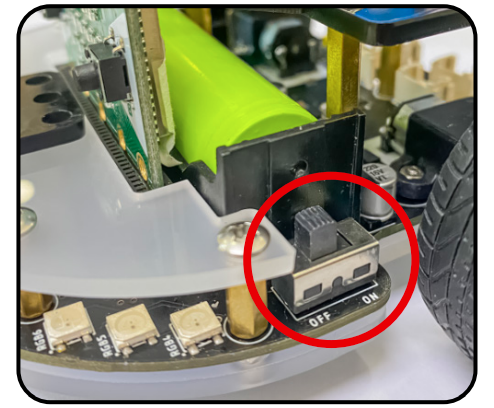
Tắt nguồn robot
Cắm đầu USB của dây cáp vào cốc sạc, cổng USB máy tính, laptop,…

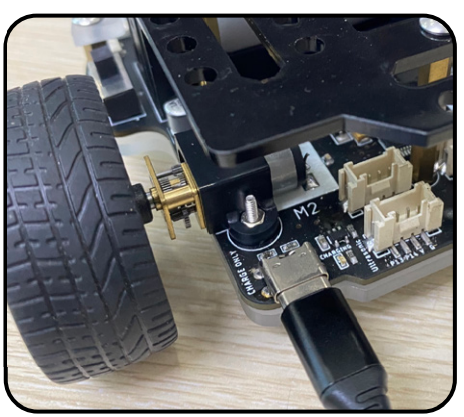
Cắm cáp sạc USB - C vào cổng sạc ở phía sau xe
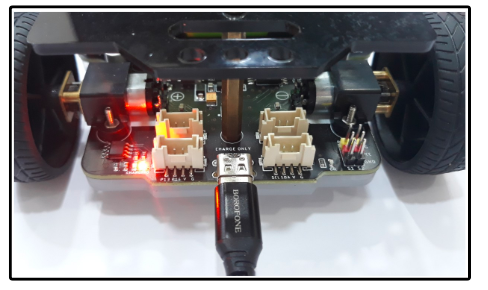
Khi sạc đầy, đèn sạc sẽ tự động tắt
Lưu ý: Không nên để cắm sạc quá 3 tiếng hoặc qua đêm