9. Bài 6: Vượt chướng ngại vật
Có chuyện gì đó vừa xảy ra, Rover đang đuổi theo ai đó. Đường đi khá lạ lẫm và có nhiều cản trở, Rover cần tránh né để đuổi kịp mục tiêu…
Mục tiêu
Ứng dụng cảm biến khoảng cách để tránh né vật cản
Làm quen với xây dựng thuật toán
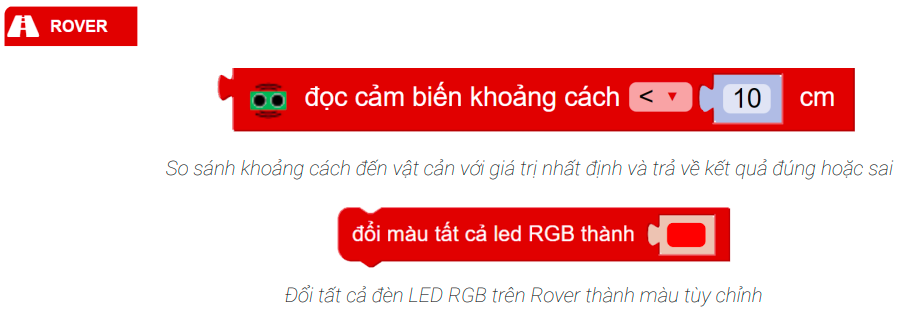
Giới thiệu khối lệnh
Chúng ta sẽ làm quen một biến thể khác của khối lệnh đọc cảm biến khoảng cách
Viết chương trình
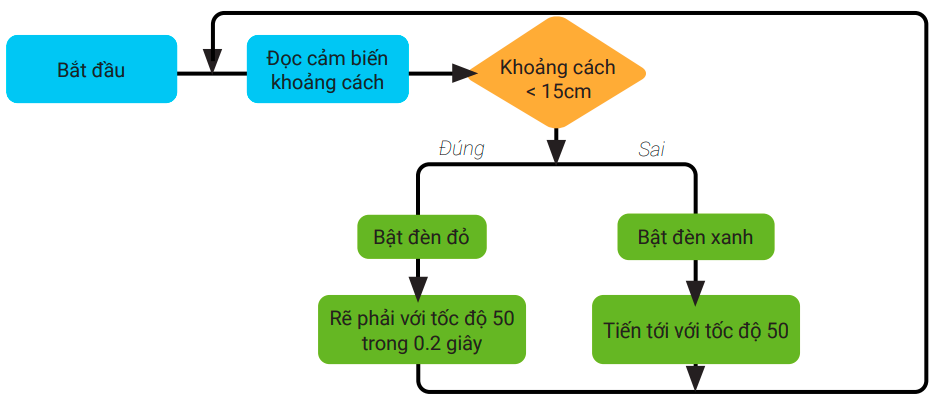
Chúng ta sẽ viết một chương trình như sau: Nếu Rover phát hiện vật cản trong phạm vi 15cm thì sẽ sáng đèn màu đỏ và rẽ phải, nếu không thì sáng đèn xanh và tiếp tục di chuyển về phía trước.
Việc đọc một chương trình thuần túy như vậy sẽ khiến chúng ta rất khó nắm bắt. Vì vậy, một thuật toán bằng hình ảnh như bên dưới sẽ giúp chúng ta dễ hình dung hơn rất nhiều:
Tạo điều kiện: Nếu Rover phát hiện vật cản trong phạm vi 15cm thì sẽ sáng đèn màu đỏ và rẽ phải

Tạo điều kiện: Nếu không thì sáng đèn xanh và tiếp tục di chuyển

Chương trình mẫu
Vượt chướng ngại vật: Tại đây
