2. Hướng dẫn lắp ráp
2.1 Lắp ráp
Các bộ phận chính của ArmBot
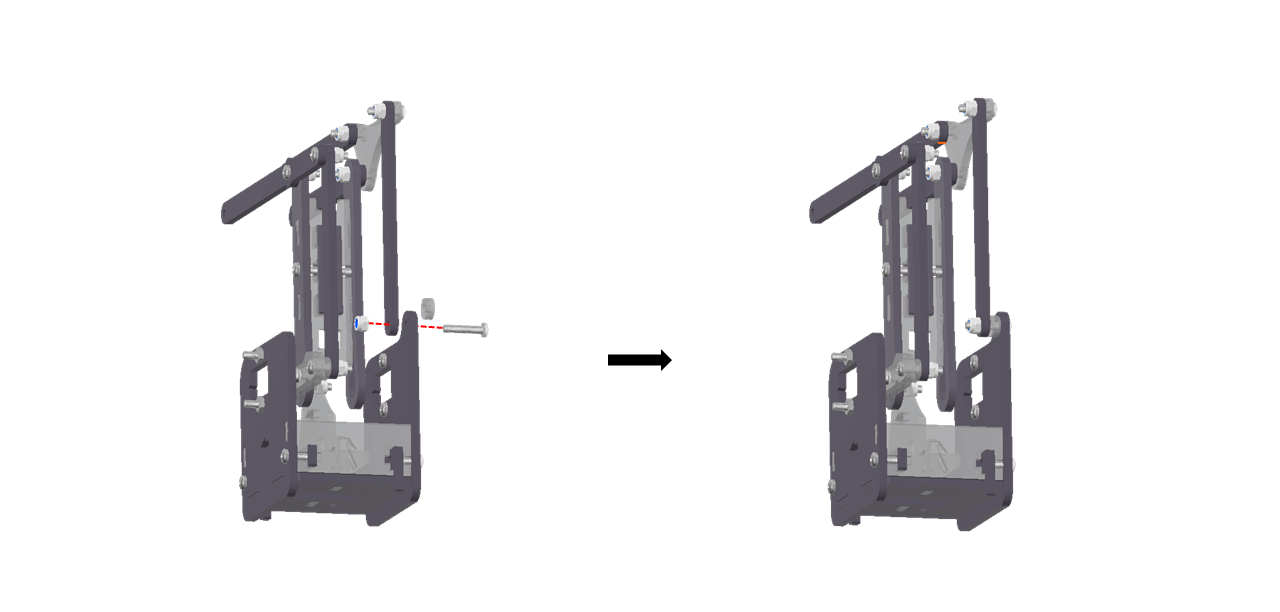
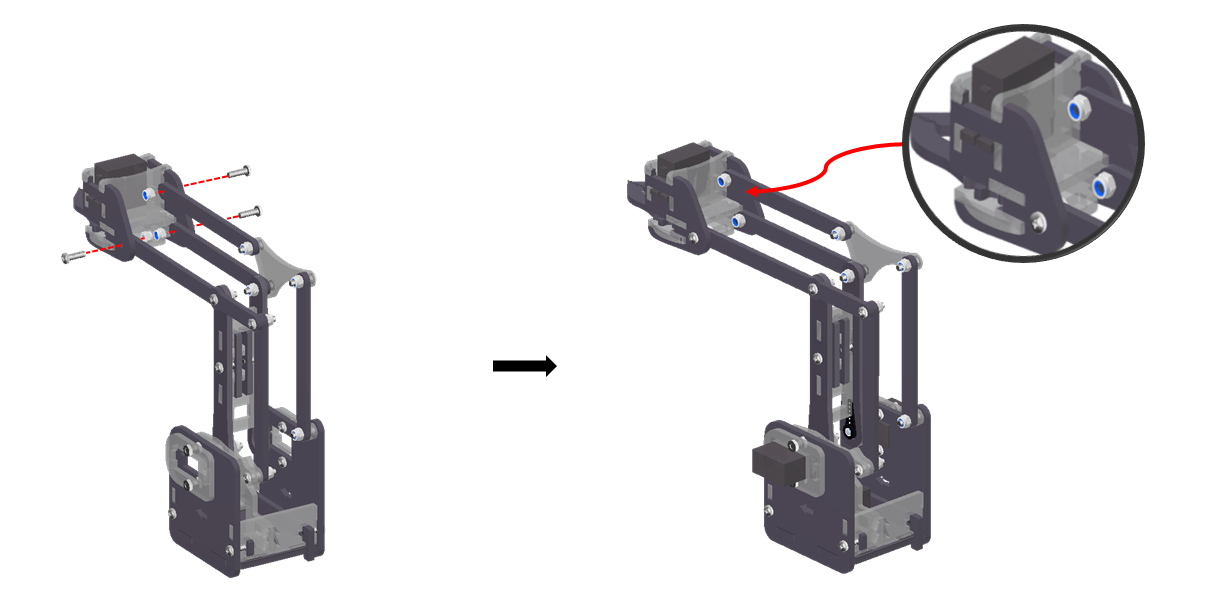
Bu lông M3-16 + đai ốc chống tháo M3
Bu lông M3-16 + đệm mica M3 + đai ốc chống tháo M3
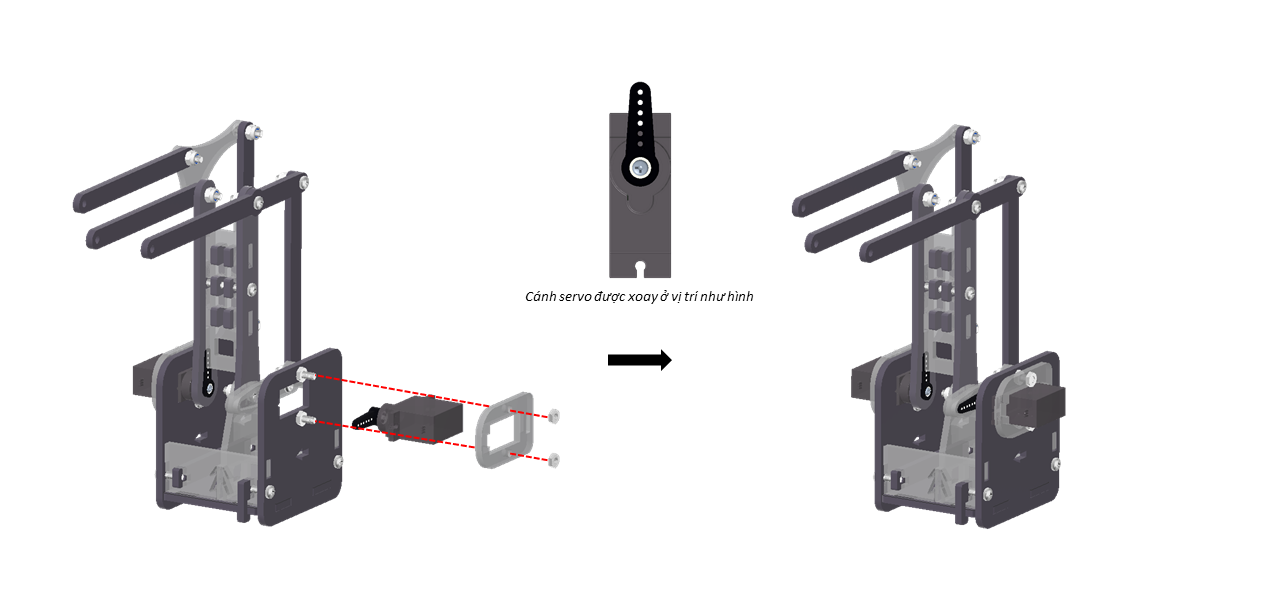
Servo khớp bên phải + tấm 22 + 2 đai ốc M3
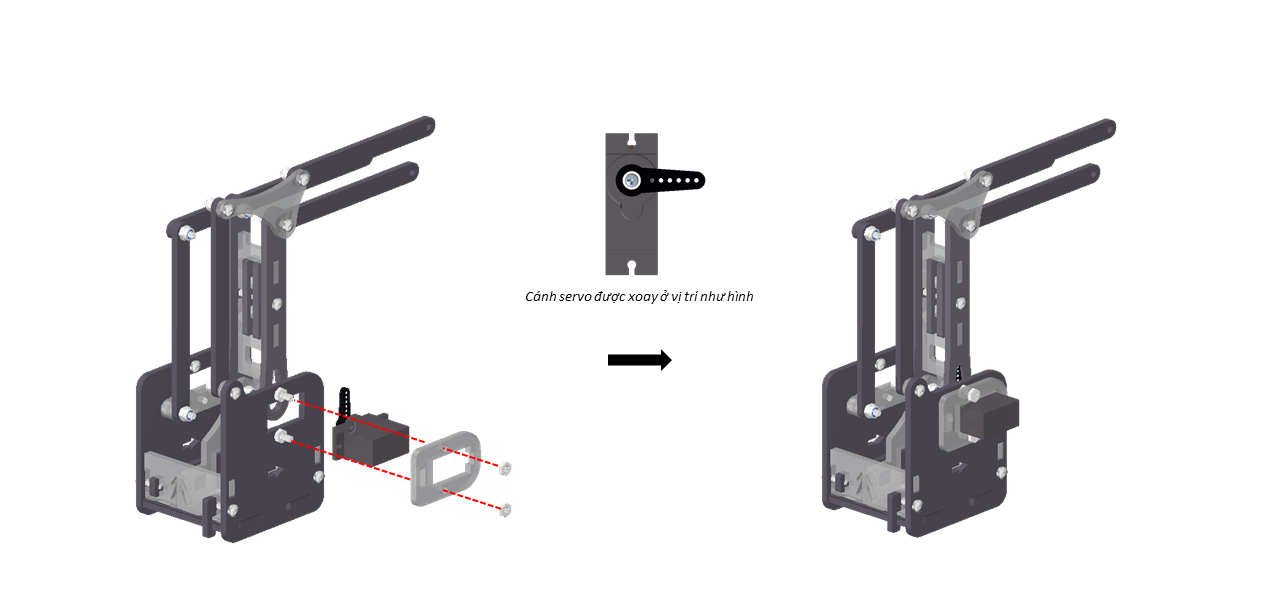
Servo khớp bên trái + tấm 22 + 2 đai ốc M3
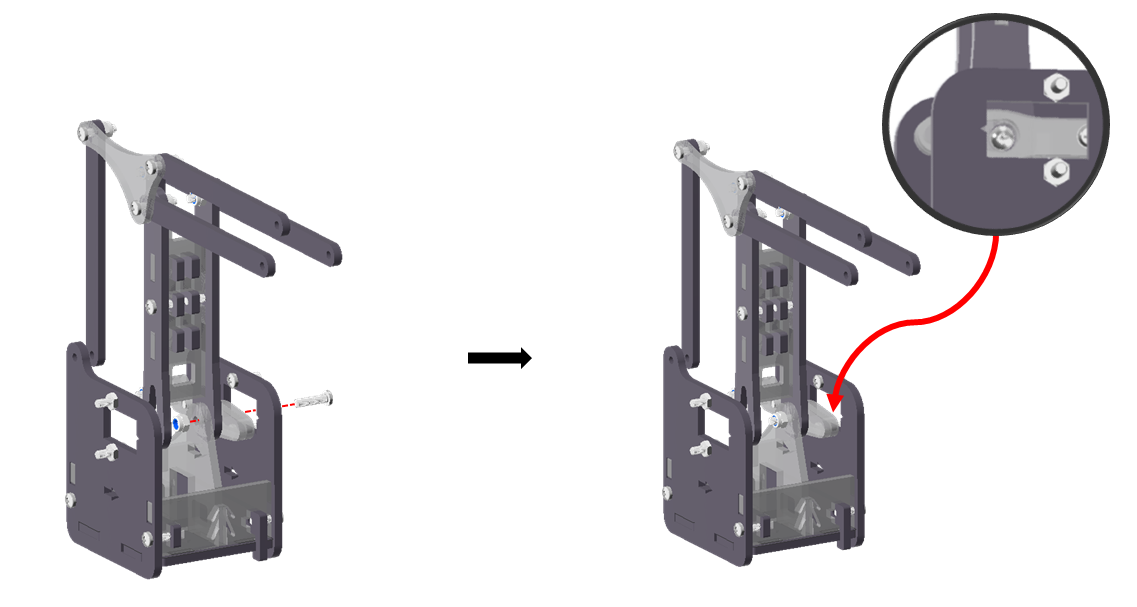
3 bu lông M3-12 + đai ốc chống tháo M3
Tấm 14 + khối vừa lắp
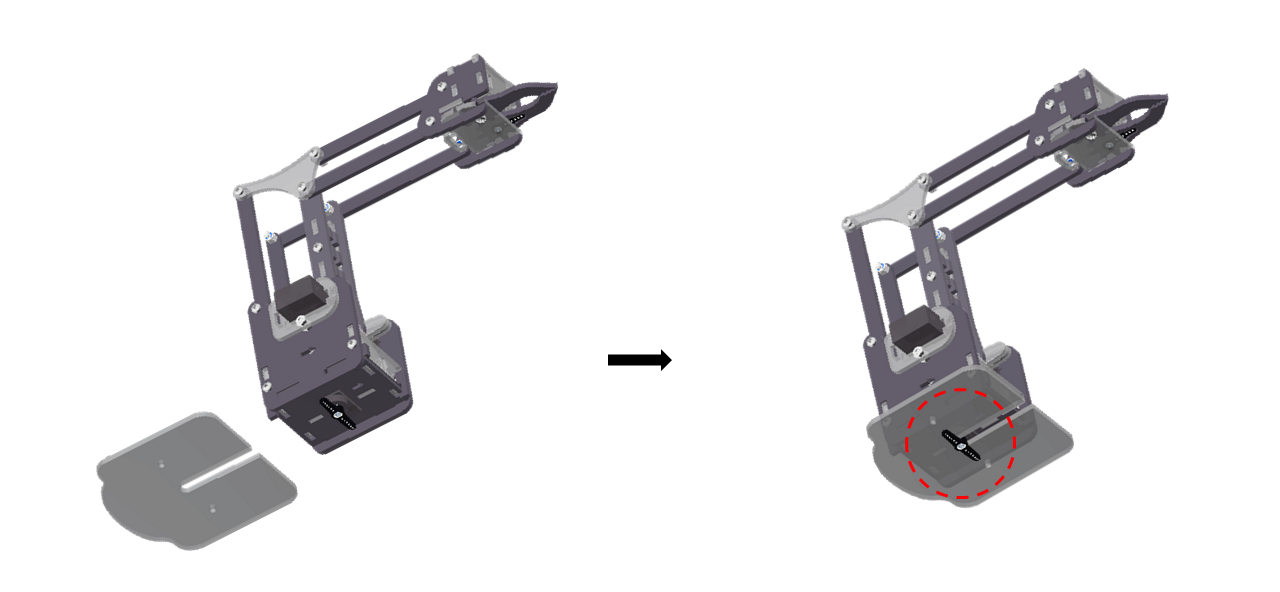
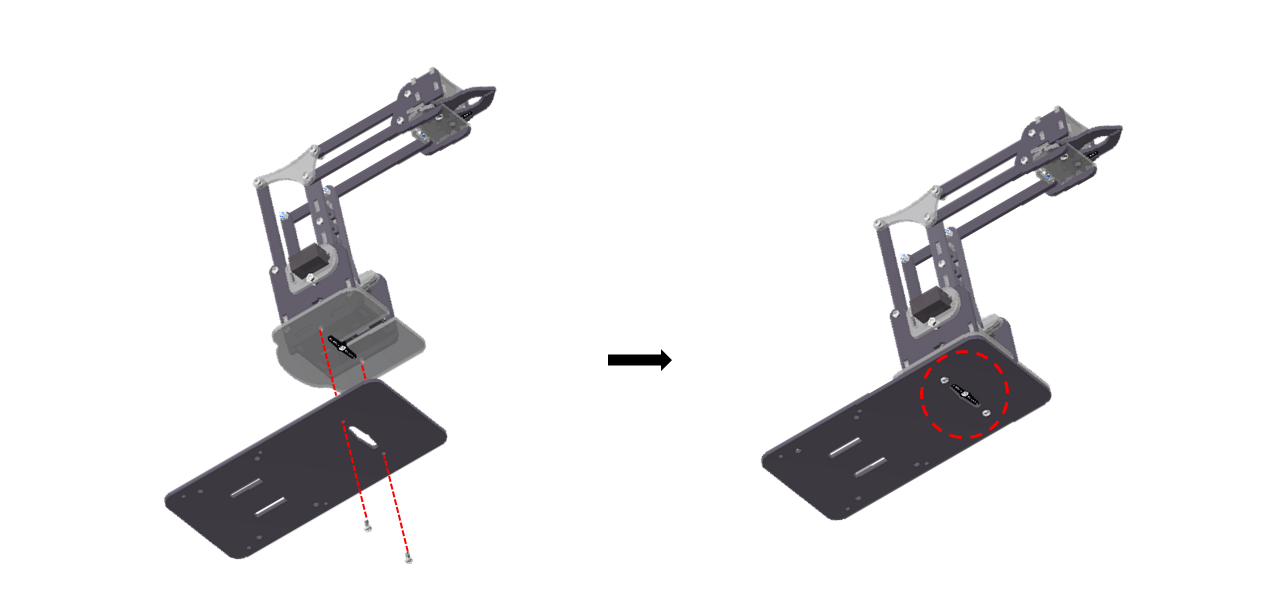
Tấm 1 + bu lông M3-6 + khối vừa lắp. (Chú ý vị trí của cánh servo)
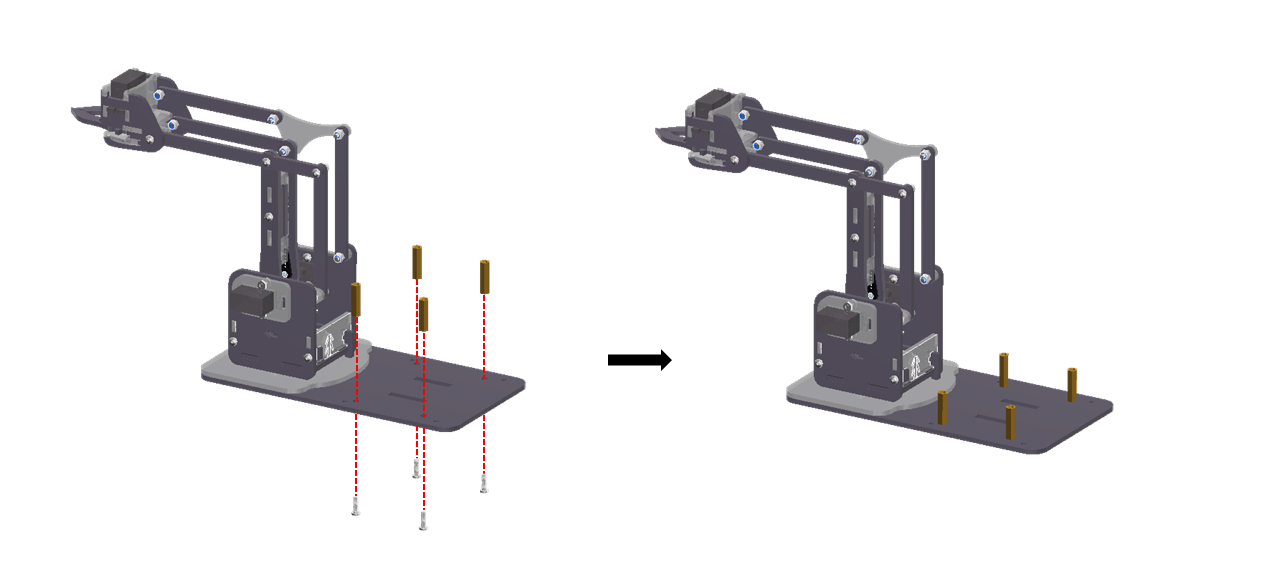
4 trụ đồng 10mm + 4 bu lông M3-6
Mạch mở rộng Yolo:Bit + 4 bu lông M3-6
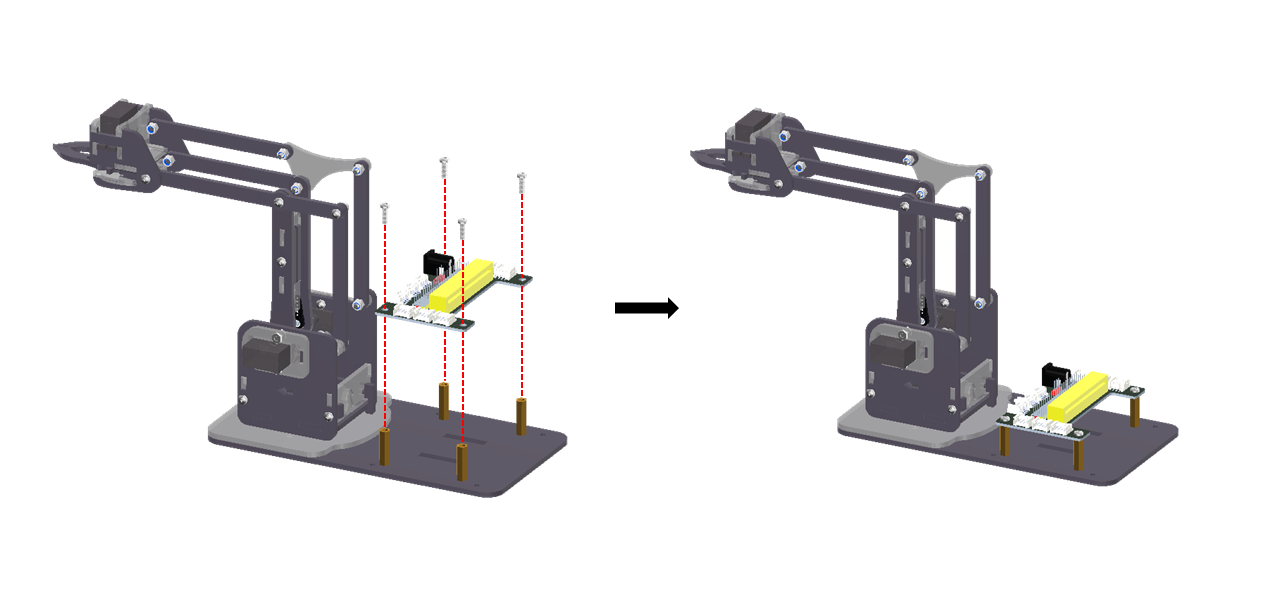
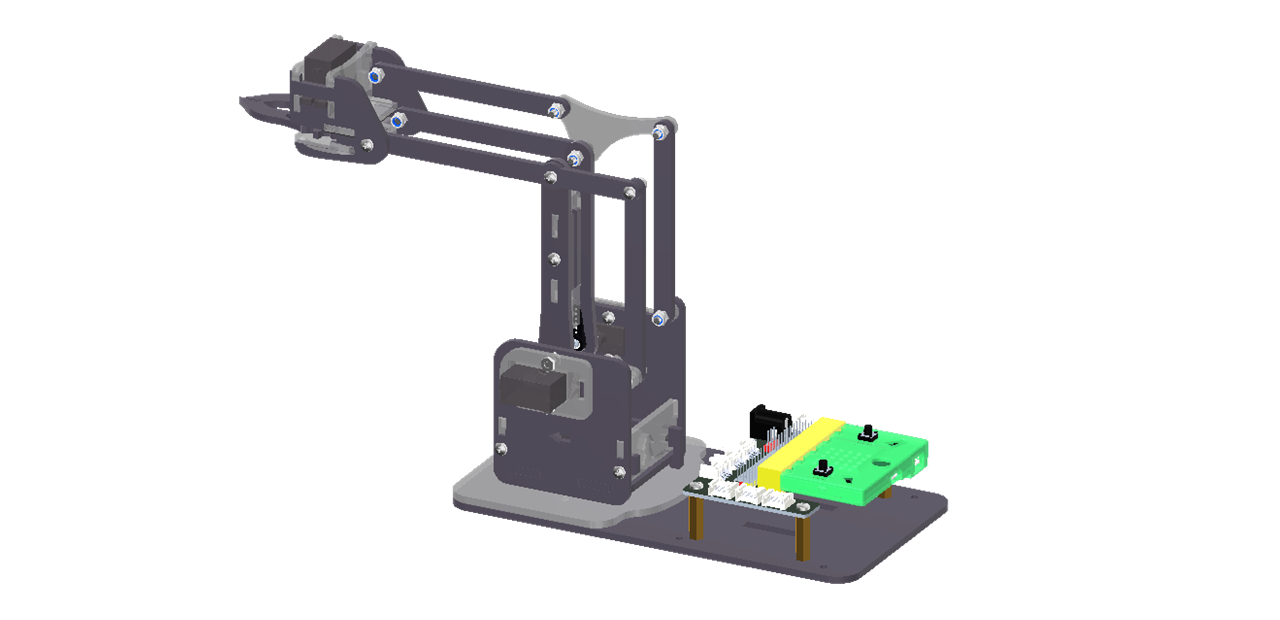
Lắp Máy tính lập trình Yolo:Bit vào mạch mở rộng.
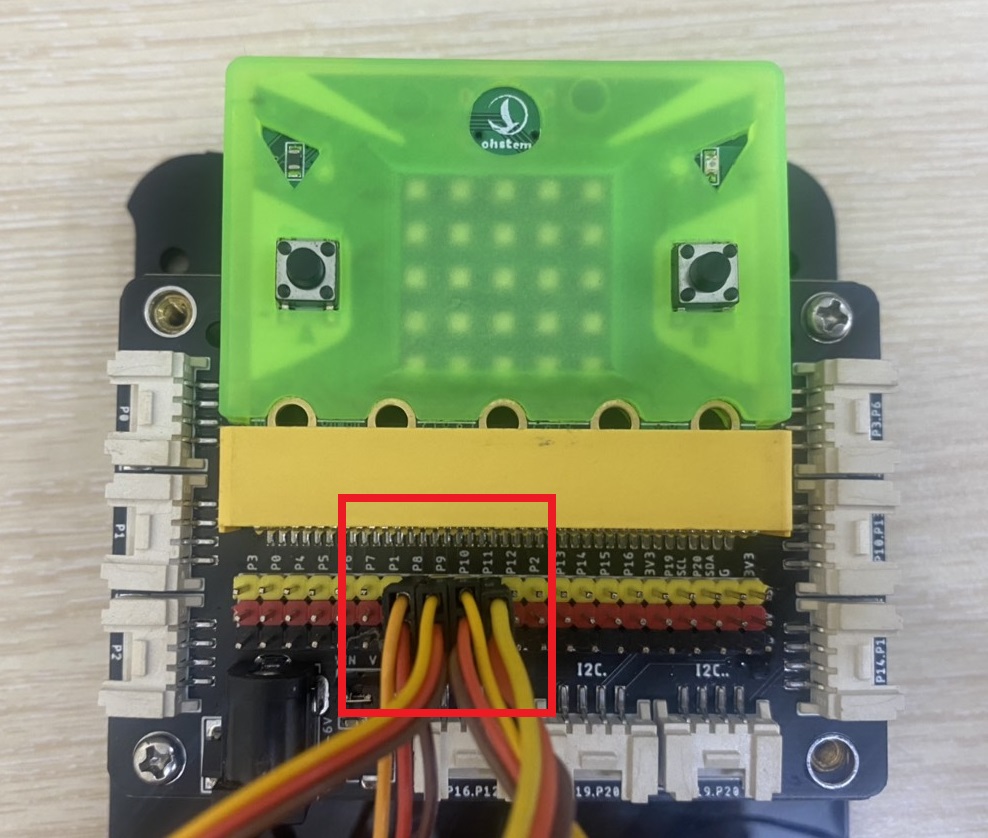
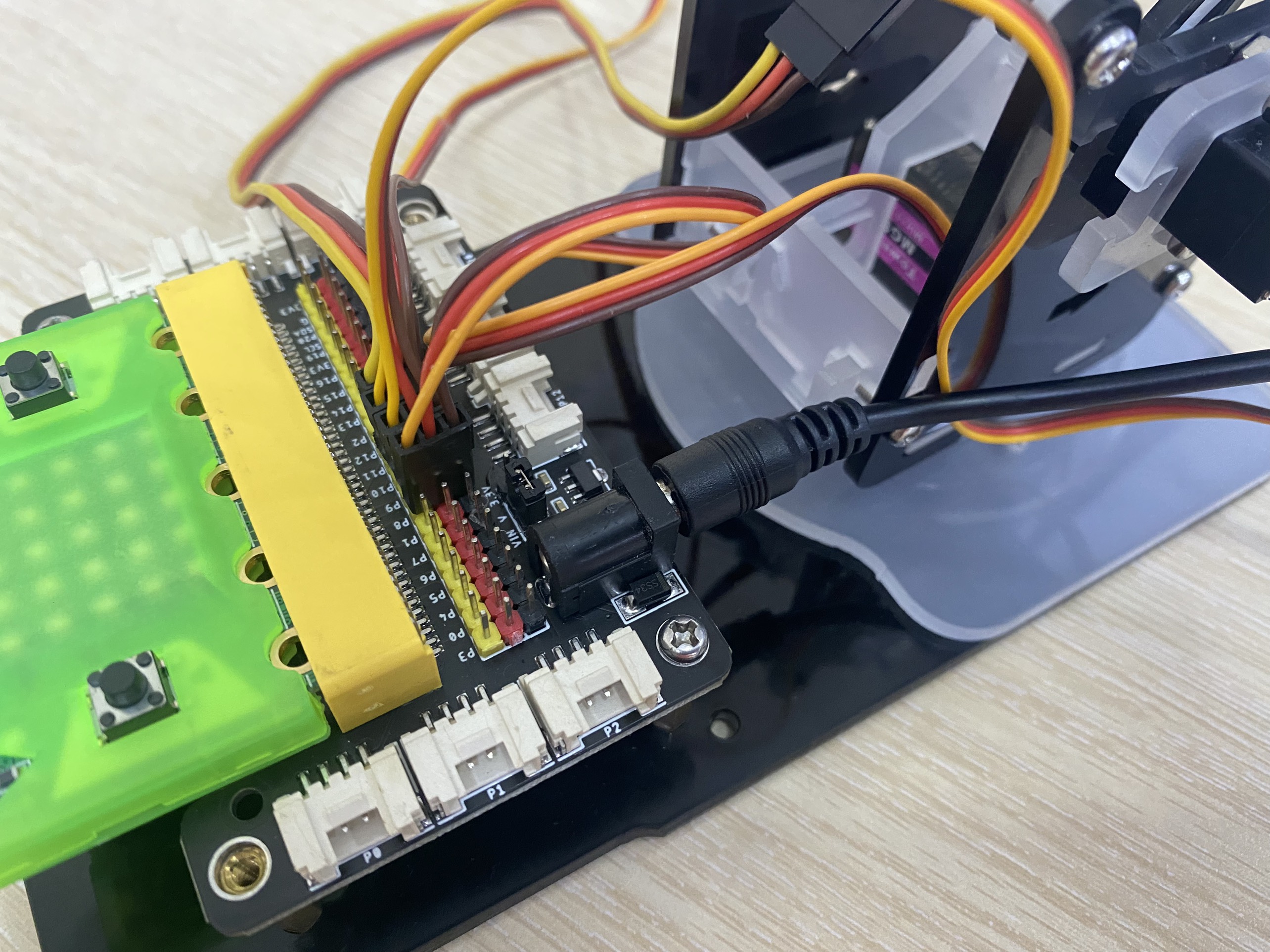
Cắm dây Servo
P8 - Servo khớp giữa
P9 - Servo khớp phải
P10 - Servo khớp trái
P11 - Servo đầu gắp
Lưu ý
Sau khi lắp xong, thực hiện các bước quan trọng sau để kiểm tra:
Không cắm nguồn hoặc pin vào mạch điều khiển.
Dùng tay di chuyển các khớp nối với servo một cách nhẹ nhàng xem có khớp nào bị cứng hay kẹt không.
Nếu có, bạn hãy nới lỏng các khớp này cho đúng sao cho di chuyển được mượt và nhẹ nhàng.
2.2 Hướng dẫn cấp nguồn
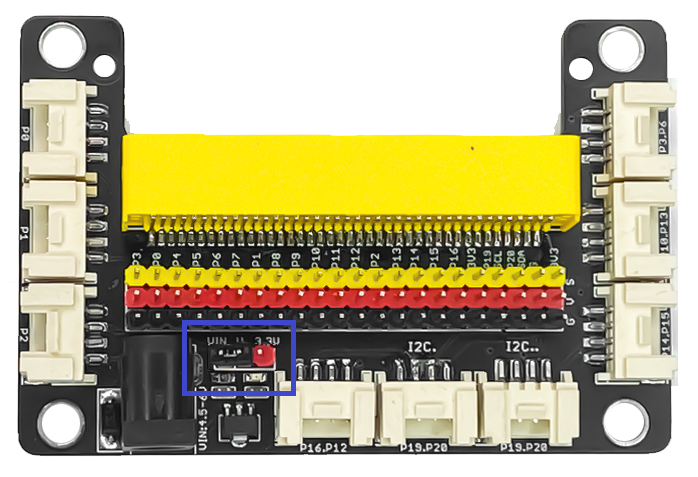
Chuyển đổi chế độ cấp nguồn
Mạch mở rộng Yolo:Bit có 2 chế độ cấp nguồn đầu vào. Để chuyển 2 chế độ này, bạn hãy chuyển jumpper như 2 hình sau:
3.3V với nguồn cấp từ Yolo:Bit
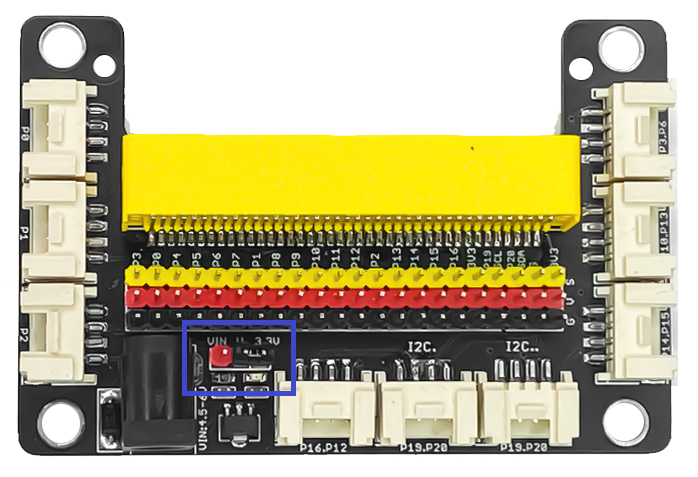
VIN (4.5-6V) với nguồn cấp từ cổng DC
Cắm dây nguồn
Cắm đầu USB của dây cáp vào cốc sạc, cổng USB máy tính, laptop,…

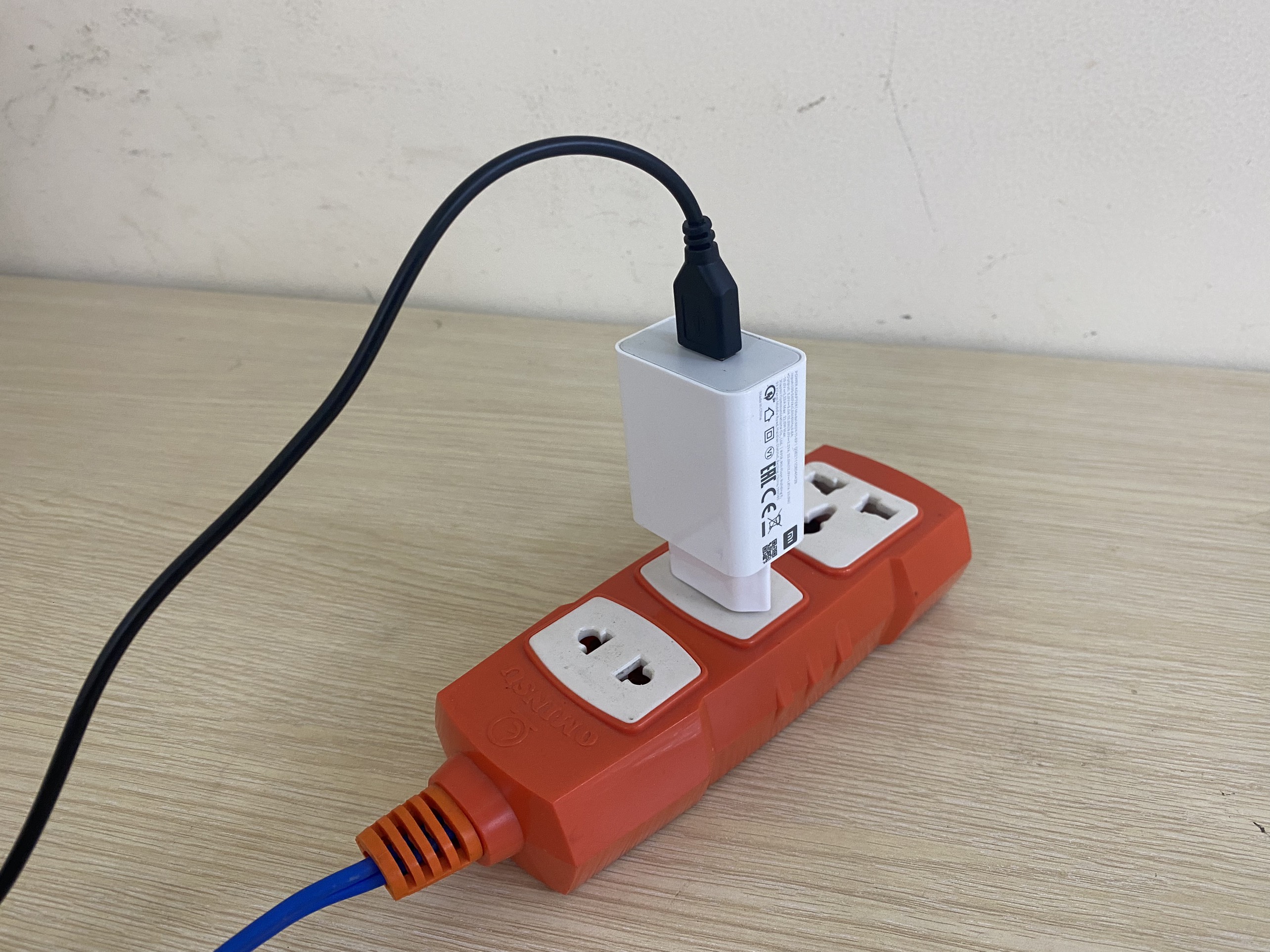
Cắm cổng DC vào mạch mở rộng Yolo:Bit
Lưu ý: Nguồn cấp tối thiếu là 500mA và tối đa là 2A để Robot hoạt động ổn định