3. Cài đặt thư viện
Để lập trình điều khiển Robot Arm, bạn cần cài đặt thư viện, thực hiện như sau:
Chọn mục “Mở rộng” và tải thư viện mở rộng Robot Arm
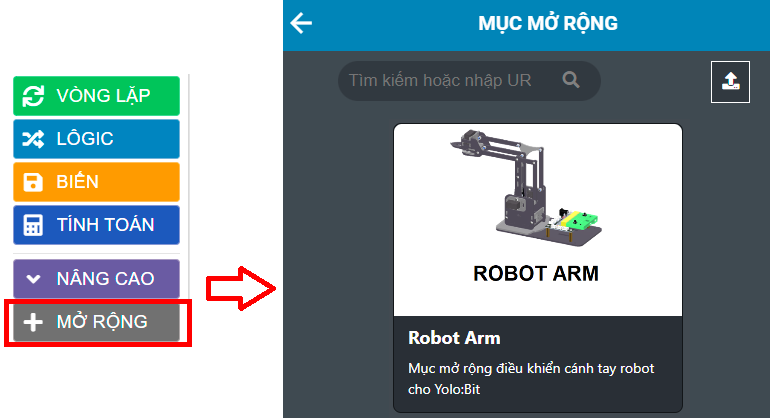
Trong danh mục khối lệnh bên trái sẽ xuất hiện “ROBOT ARM”

Để lập trình điều khiển Robot Arm, bạn cần cài đặt thư viện, thực hiện như sau:
Chọn mục “Mở rộng” và tải thư viện mở rộng Robot Arm
Trong danh mục khối lệnh bên trái sẽ xuất hiện “ROBOT ARM”