1. Giới thiệu
1. Cánh tay robot là gì?
Cánh tay robot là một trong những robot phổ biến nhất trong thế giới sản xuất. Chúng được lập trình thực hiện các nhiệm vụ cụ thể, lặp đi lặp lại một cách chính xác để thay cho sức người.

Các ArmBot này hoạt động theo cách tương tự như cánh tay người, với một số khớp có thể chuyển động dọc theo trục hoặc có thể xoay theo một số hướng nhất định.
Giống như cánh tay của chúng ta, cánh tay robot có cấu tạo gồm cổ tay, cẳng tay, khuỷu tay và khớp vai.
Tuy nhiên, ArmBot có thể có nhiều trục cho phép nó chuyển động theo nhiều cách và phức tạp hơn, những trục này có chuyển động độc lập hay còn gọi là bậc tự do.
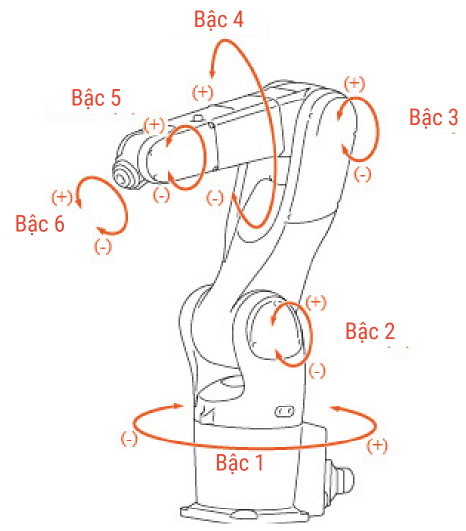
Dưới đây là cánh tay robot có 6 bậc tự do.
2. Giới thiệu ArmBot
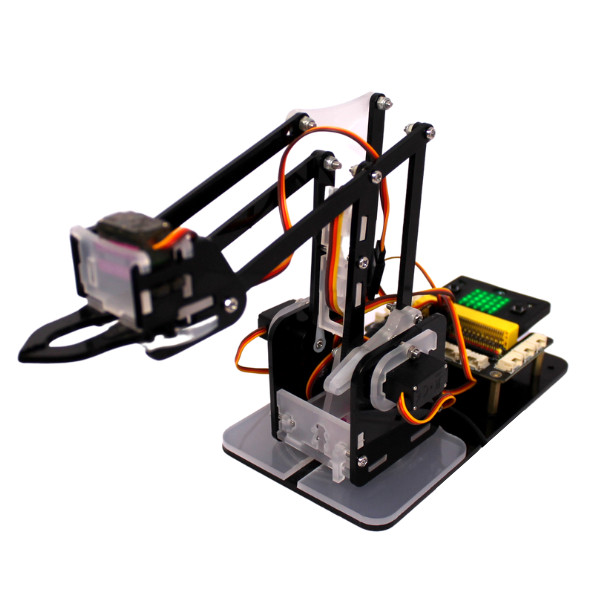
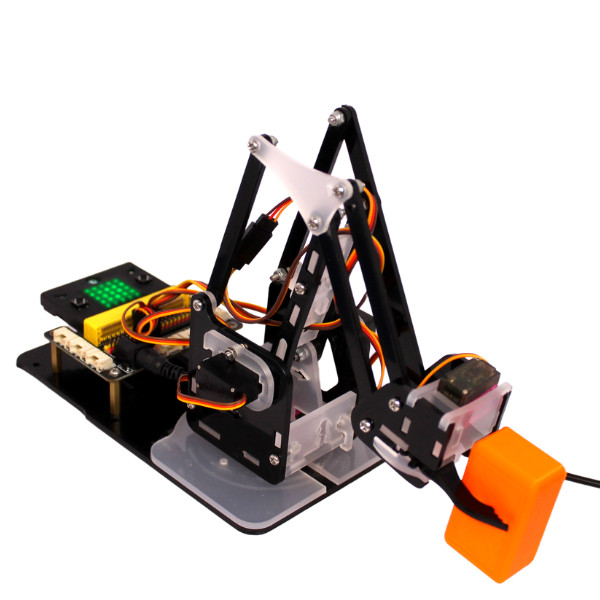
ArmBot là robot giáo dục mô phỏng một cánh tay robot công nghiệp với 4 bậc tự do.
Sản phẩm này dành cho người mới bắt đầu tìm hiểu về môn học Robotics, làm quen với kỹ năng lắp ráp và lập trình tư duy logic theo một cách thú vị.
ArmBot có thể điều khiển và lập trình được trên các thiết bị thông minh như smartphone, máy tính bảng hay laptop thông qua các khối lệnh đơn giản và trực quan.
2.1 Hình ảnh
2.2 Tham số
Tên |
Tham số |
Điện áp |
5 V |
Kích thước thu gọn |
130mm x 140mm x 70mm |
Động cơ |
4 động cơ servo MG91R 180 độ, hộp số bánh răng sắt |
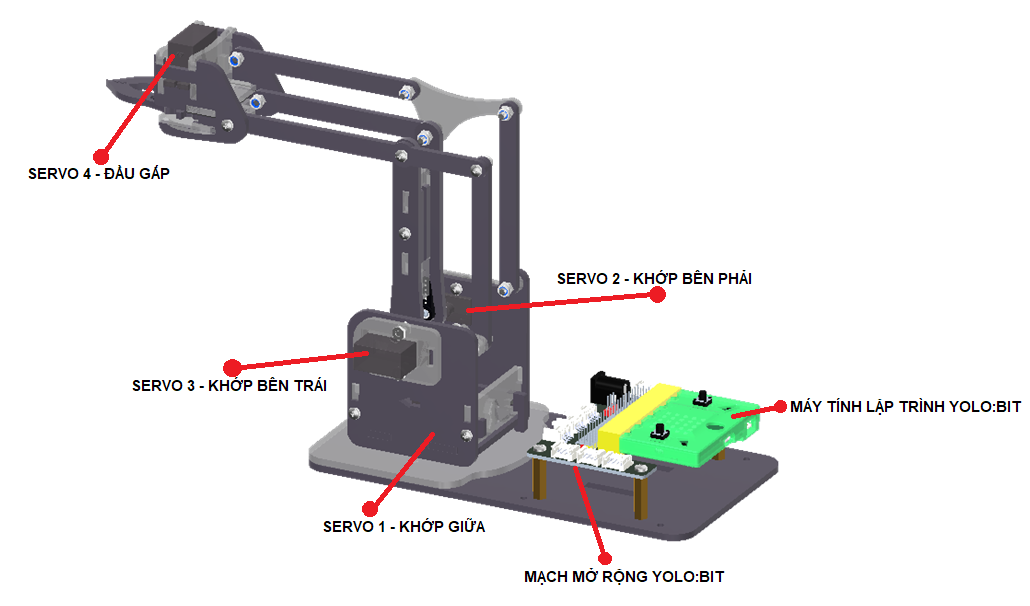
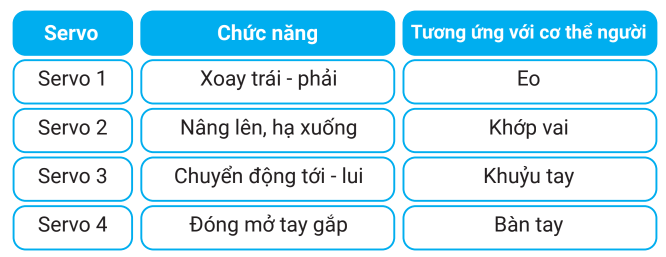
2.3 Cấu tạo ArmBot
ArmBot là một cánh tay robot với 4 bậc tự do có cấu tạo như sau:
ĐỘNG CƠ SERVO LÀ GÌ:
Động cơ trong ArmBot giống như là tay chân chúng ta, giúp ArmBot có thể cử động được.
Có nhiều loại động cơ, servo là một trong các loại động cơ phổ biến.
Chúng ta thử tìm hiểu 3 loại động cơ phổ biến nhất nhé.
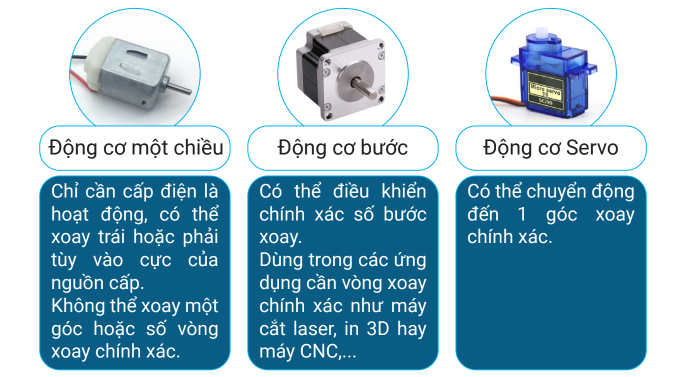
Theo như đặc điểm ở trên thì động cơ servo và động cơ bước đều có thể dùng làm cánh tay robot.
Tuy nhiên giá thành của động cơ bước là khá cao, có thể gấp nhiều lần động cơ servo loại đơn giản.