2. Động cơ Servo SG90S

Động cơ Servo SG90S có thể được điều khiển và ứng dụng vào các dự án như lái robot, di chuyển các khớp cánh tay robot lên xuống,…
Sản phẩm có 2 loại: động cơ xoay được 180 độ và động cơ xoay được 360 độ.
1. Mua sản phẩm

2. Kết nối
Bước 1: Chuẩn bị các thiết bị như sau:

|
|
|
|---|---|---|
Máy tính lập trình Yolo:Bit |
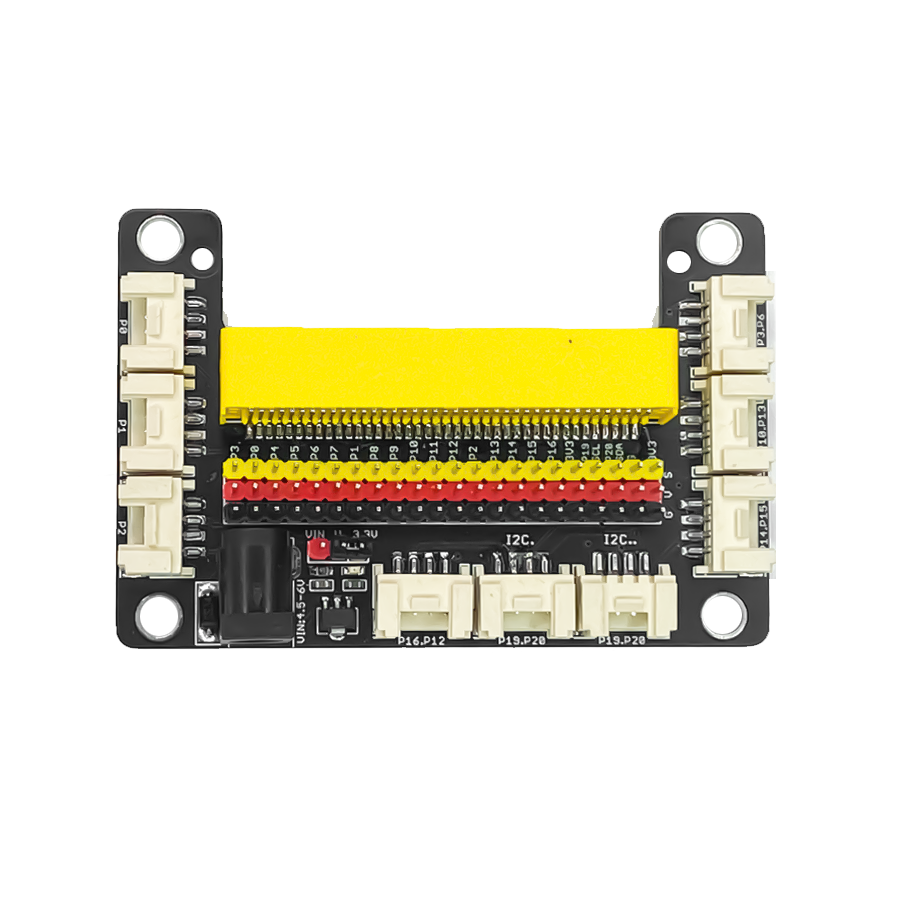
Mạch mở rộng cho Yolo:Bit |
Động cơ Servo SG90S |
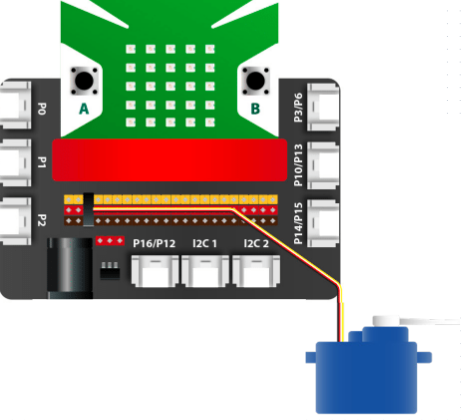
Bước 2: Cắm Yolo:Bit vào mạch mở rộng
Bước 3: Kết nối thiết bị vào chân P4 trên mạch mở rộng
3. Hướng dẫn lập trình với OhStem App
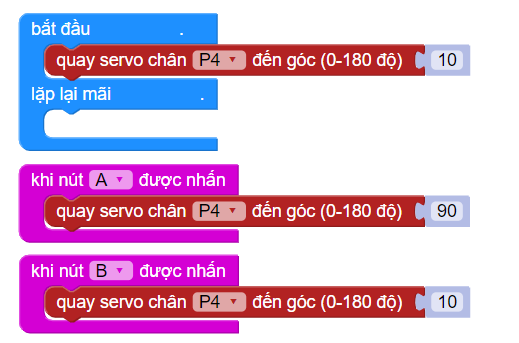
Đối với động cơ servo 180 độ:
Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:

Trước khi lập trình, bạn cần xác định vị trí góc của servo để việc lập trình thuận lợi hơn.
Gửi chương trình sau xuống Yolo:Bit, để kiểm tra hoạt động của servo:
Note
Khi sau khi xác định vị trí góc của servo, bằng câu lệnh trong khối bắt đầu. Bạn hãy nhấn nút để xem sự di chuyển của cánh servo.
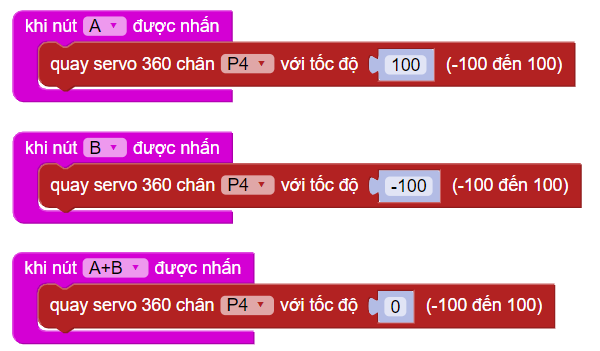
Đối với động cơ servo 360 độ:
Sử dụng khối lệnh sau trong danh mục CHÂN CẮM, để điều khiển:

Động cơ servo 360, sẽ có các chế độ hoạt động như sau:
Tốc độ 0: Đứng yên
Tốc độ 100: Tối đa
Tốc độ -100 - 0: Động cơ quay ngược chiều kim đồng hồ
Tốc độ 0- 100: Động cơ quay cùng chiều kim đồng hồ
Gửi chương trình sau xuống Yolo:Bit, để kiểm tra hoạt động của servo:
Note
Chương trình được ứng dụng vào các dự án như sáng tạo bánh xe robot, ròng rọc của cáp treo…
5. Hướng dẫn lập trình Arduino
Mở phần mềm Arduino IDE. Xem hướng dẫn lập trình với Arduino tại đây.
Copy đoạn code sau, click vào nút
Verifyđể kiểm tra lỗi chương trình. Sau khi biên dịch không báo lỗi, bạn có thể nạp đoạn code vào board.Điều khiển Servo 180 độ:
#include "YoloBit.h"
#include <Servo.h>
YoloBit yolobit;
// Điều khiển servo 180, quay liên tục từ góc 0 đến 180 độ và ngược lại.
Servo myservo;
int pos = 0; // lưu vị trí của servo
void setup() {
myservo.attach(P4); // kết nối servo vào chân P4
}
void loop() {
for (pos=0; pos<=180; pos++) { // từ 0 đến 180 độ
myservo.write(pos);
delay(15);
}
// Đảo ngược quá trình từ 180 đến 0 độ
for (pos=180; pos>=0; pos--) {
myservo.write(pos);
delay(15);
}
}
Điều khiển Servo 360 độ:
#include <Servo.h>
#include “Yolobit.h”
Servo myservo;
Yolobit yolobit;
int pos = 0;
int Control_Pin = P4;
void setup() {
// Điều khiển servo qua chân P4 của Yolobit
myservo.attach(Control_Pin );
// Servo ở trạng thái đứng yên, ở góc 90 độ
myservo.write(90);
}
void loop() {
// Servo quay về vị trí tối đa ở góc 180 độ trong 1 giây
myservo.write(180);
delay(1000);
// Servo ở trạng thái đứng yên trong 1 giây
myservo.write(90);
delay(1000);
// Servo quay về vị trí tối đa ở góc 0 độ trong 1 giây
myservo.write(0);
delay(1000);
// Servo ở trạng thái đứng yên trong 1 giây
myservo.write(90);
delay(1000);
}