13. Máy rửa tay không chạm
1. Mục tiêu
Thực hiện một hệ thống máy rửa tay không tiếp xúc sử dụng cảm biến siêu âm và bơm mini góp phần phòng chống các bệnh lây nhiễm.
2. Thiết bị cần dùng
Mạch Yolo:Bit
Mạch mở rộng Yolo:Bit.

Module đóng ngắt 2 kênh
Máy bơm mini

Cảm biến siêu âm

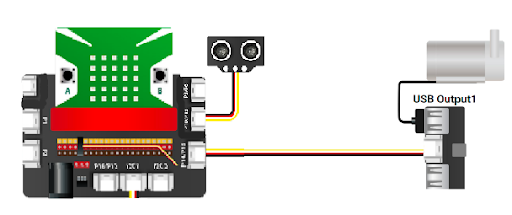
3. Kết nối
Kết nối module đóng ngắt 2 kênh vào cổng P14/15
Kết nối máy bơm mini ở cổng output1
Kết nối cảm biến siêu âm với cổng P10/13
4. Lập trình
Giới thiệu khối lệnh
Để làm việc cảm biến siêu âm, chúng ta sẽ sử dụng các khối lệnh sau:
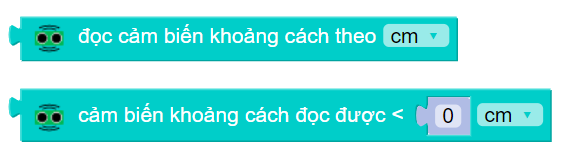
Khối lệnh đầu tiên sẽ giúp chúng ta đo khoảng cách từ cảm biến đến vật thể. Khối lệnh thứ 2 sẽ đo khoảng cách từ cảm biến và so sánh với điều kiện nhập vào.
Lập trình
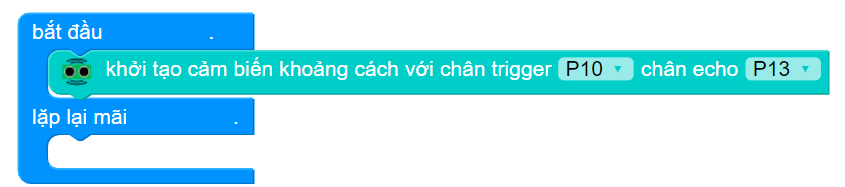
Khi sử dụng cảm biến siêu âm, trước tiên, chúng ta cần khai báo tên cổng mà bạn cắm cảm biến trên mạch mở rộng:
Ở dự án này, để đơn giản nhất, chúng ta sẽ sử dụng khối lệnh thứ 2:

Chúng ta sẽ kết hợp khối lệnh trên với câu lệnh điều kiện để viết chương trình: Nếu khoảng cách bé hơn 5cm, máy bơm sẽ bật 3 giây rồi tắt. Ngược lại, nếu khoảng cách lớn hơn 5cm, máy bơm sẽ không hoạt động.
Chương trình sẽ như sau:

Ghép hai chương trình lại với nhau, ta có chương trình hoàn chỉnh như sau:

5. Chương trình mẫu
Máy rửa tay tự động: Tại đây
