7. Bài học 4: Điều khiển tốc độ chớp tắt đèn LED
Mục tiêu
Trong bài học trước, chúng ta đã tìm hiểu về Digital Input thông qua nút nhấn với 2 trạng thái là HIGH và LOW. Tuy nhiên trong thực tế, đôi lúc chúng ta cần nhiều hơn 2 trạng thái như vậy. Một số ví dụ: nút điều chỉnh âm thanh (cho biết âm lượng đang ở mức nào) hay cảm biến ánh sáng (độ sáng là bao nhiêu),…
Trong bài học này, chúng ta sẽ cùng tìm hiểu về tín hiệu Analog và lập trình điều khiển thời gian chớp tắt đèn LED bằng giá trị của cảm biến xoay.
Kiến thức mới
Tín hiệu Analog
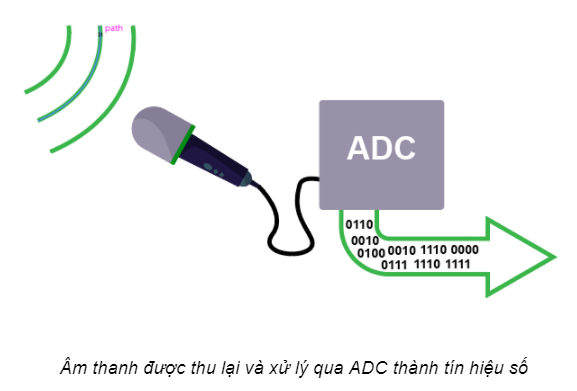
Khác với tín hiệu Digital Input, tín hiệu Analog Input giúp đo các giá trị đầu vào theo một dải giá trị thay vì chỉ là HIGH và LOW.
Tuy nhiên, xét về bản chất, máy tính chỉ có thể hiểu được tín hiệu Digital (các giá trị 0 và 1). Do đó, các chip vi điều khiển đều có 1 bộ chuyển đổi từ tín hiệu Analog sang Digital, gọi là ADC (Analog to Digital Converter).
Lưu ý: Trong 6 cổng mở rộng của xController, chỉ có cổng 4, 5 và 6 là có bộ ADC và có thể giao tiếp được với các module sử dụng tín hiệu Analog. Giá trị tín hiệu các chân Analog này có dải từ 0 (tương ứng với 0V) đến 4095 (tương ứng với 3.3V).
Ví dụ: Nếu giá trị tín hiệu Analog xuất ra là 2047 thì điện áp sẽ nằm trong khoảng 1.65V.
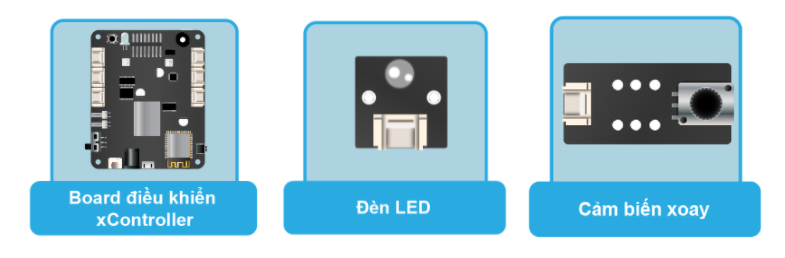
Thiết bị cần sử dụng
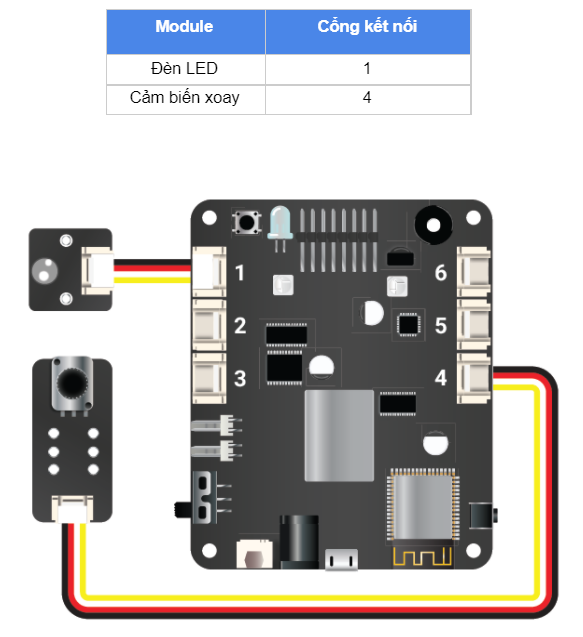
Kết nối phần cứng
Viết chương trình
Mở phần mềm uPyCraft.
Tạo một file chương trình mới (
File > New) và lưu với tên main.py bằng cách chọn menuFile > Save….Copy đoạn code sau, click vào nút
DownloadAndRunđể chạy chương trình.
rotaryvalue = pin41.read_analog()
while True:
pin11.write_digital((1))
time.sleep(rotaryvalue)
pin11.write_digital((0))
time.sleep(rotaryvalue)
Giải thích chương trình
rotaryvalue = pin41.read_analog()
Đặt biến rotaryvalue là giá trị tín hiệu Analog ở chân IO được chỉ định. Do cảm biến xoay trả về tín hiệu Analog và được kết nối với cổng số 4 trên xController nên ta dùng pin41.read_analog(). Lúc này biến rotaryvalue sẽ trả về giá trị kiểu số nguyên (int) nằm trong khoảng từ 0 ~ 4095.
time.sleep(rotaryvalue)
Tạm ngừng chương trình một khoảng thời gian bằng với giá trị đọc được từ cảm biến xoay. Do đó, bạn có thể điều chỉnh thời gian tạm ngừng bằng cách xoay cảm biến qua trái (giảm dần) hoặc qua phải (tăng dần).
Sau khi nạp chương trình vào board, bạn xoay biến trở sẽ thấy sự thay đổi về thời gian bật tắt đèn LED.
Nếu xoay về tận cùng bên trái (giá trị là 0) thì LED sẽ chớp liên tục và rất khó để nhận ra trạng thái bật tắt của đèn LED. Ngược lại, nếu xoay về tận cùng bên phải, giá trị đọc được sẽ là 4095 (tương đương với hơn 4 giây), bạn sẽ dễ dàng nhìn thấy LED bật và tắt hơn.