4. Bài 3: Robot nhảy múa
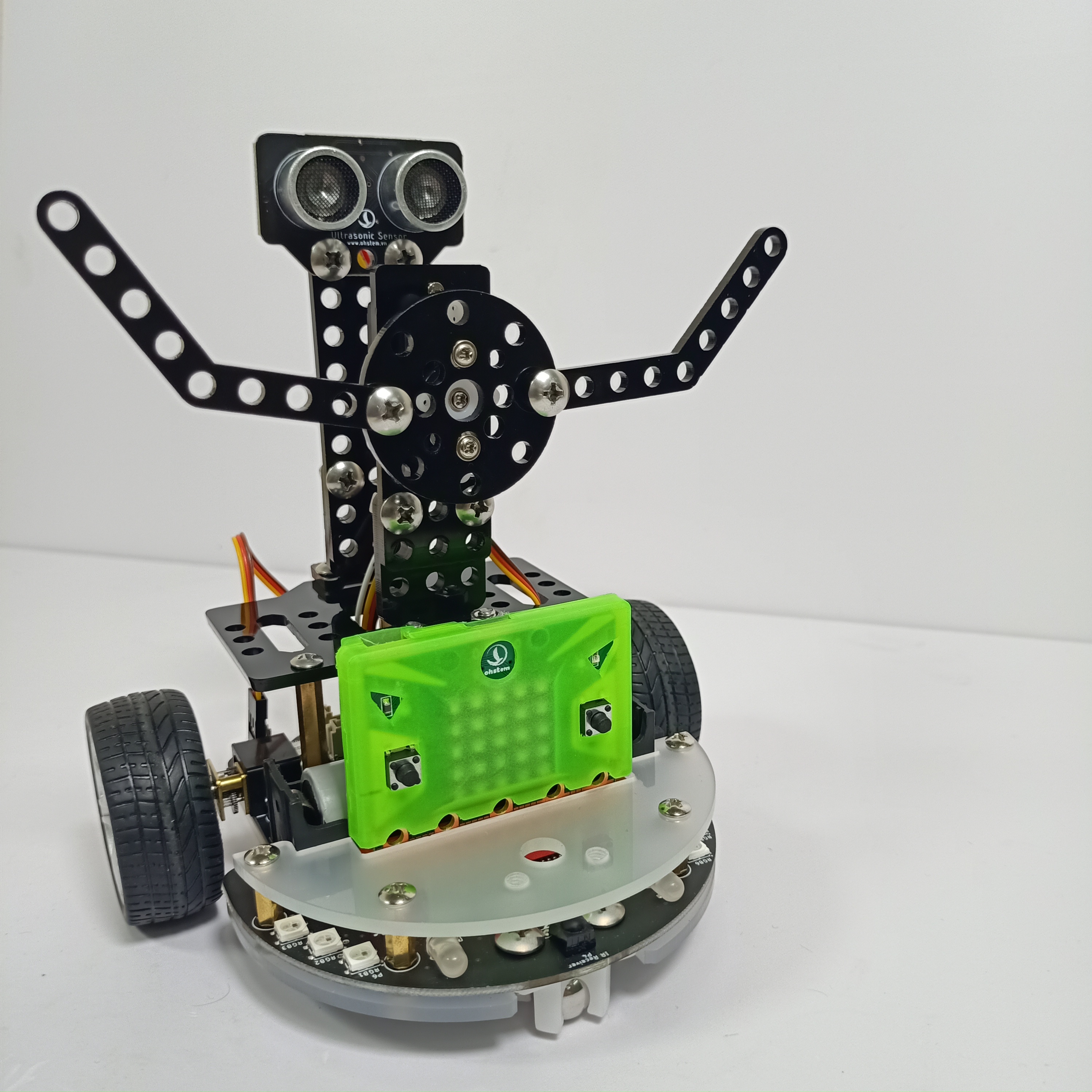
1. Hướng dẫn lắp ráp
2. Cách thực hiện
Cho Robot đi thẳng liên tục
Khi gặp vật cản sẽ dừng lại, nháy đèn (bật đèn 2 bên và led RGB), nhảy múa (quay động cơ servo) và phát nhạc.
3. Viết chương trình
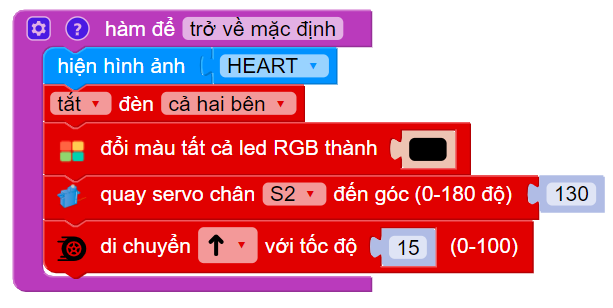
Đầu tiên, chúng ta viết hàm thiết lập trang thái mặc định của robot:
Tạo hàm trở về mặc định
Chọn ảnh mặc định HEART, tắt hết đèn.
Quay servo về góc sao cho vị trí tay robot là cân bằng
Cho Robot di chuyển thẳng với tốc độ tùy chỉnh (nên chỉnh tốc độ dưới 50 để giảm quán tính khi robot dừng đột ngột).
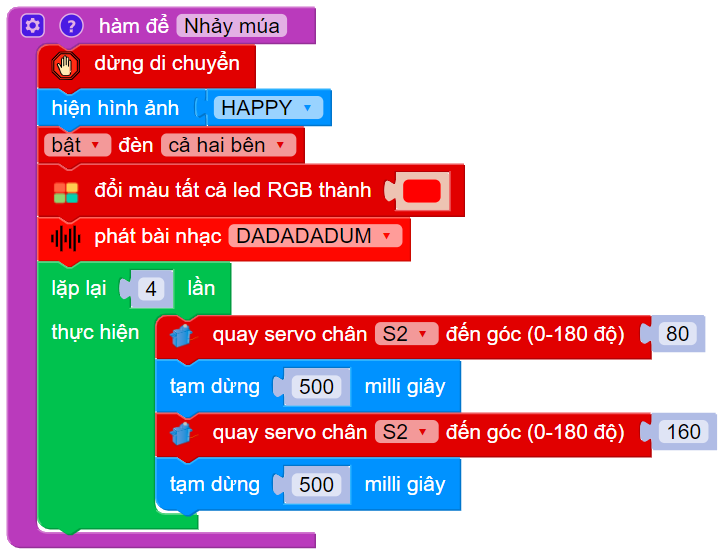
Tiếp theo, chúng ta viết hàm để Robot có thể nhảy múa bao gồm:
Tạo hàm Nhảy múa.
Dừng di chuyển và hiện hình ảnh Happy
Bật đèn và phát nhạc
Nhảy múa:
Quay chân servo đến góc 80, trong 500 milli giây.
Tương tự, quay chân servo đến góc 160.
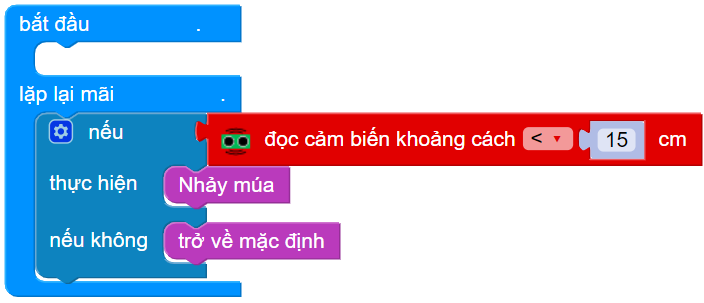
Ở chương trình chính, ta liên tục đọc cảm biến khoảng cách, nếu:
Nhỏ hơn 15cm: Thực hiện gọi hàm Nhảy múa
Lớn hơn 15cm: Thực hiện gọi hàm trở về mặc định
4. Chương trình mẫu
Robot nhảy múa: Tại đây
