Module servo 8 kênh I2C là một module cho phép điều khiển đồng thời tối đa 8 động cơ servo thông qua kết nối với các bộ vi điều khiển như Yolo:Bit hoặc Yolo UNO. Mạch sử dụng giao tiếp I2C, giúp tiết kiệm chân kết nối và dễ dàng mở rộng khi xây dựng các dự án có nhiều động cơ servo.
Một vài ứng dụng có thể sử dụng module này như: Hệ thống mở cửa tự động với nhiều cửa, mô hình robot nhiều khớp, cánh tay robot… Trong hướng dẫn này, chúng tôi sẽ hướng dẫn bạn kết nối module này với mạch lập trình cơ bản Yolo:Bit và Yolo UNO.
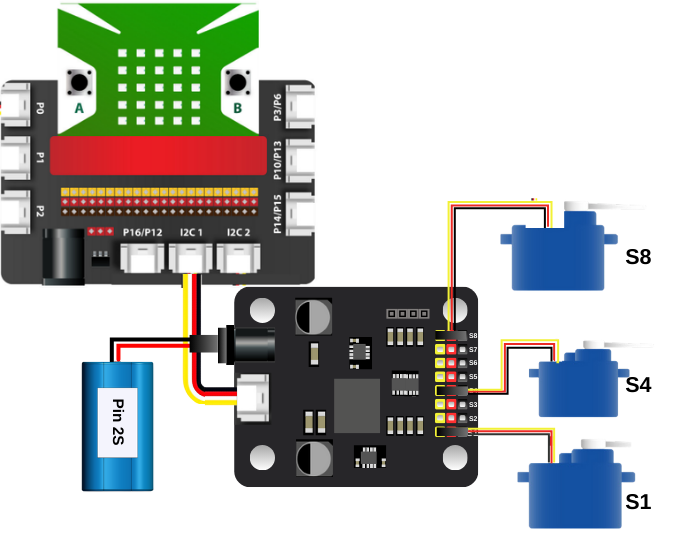
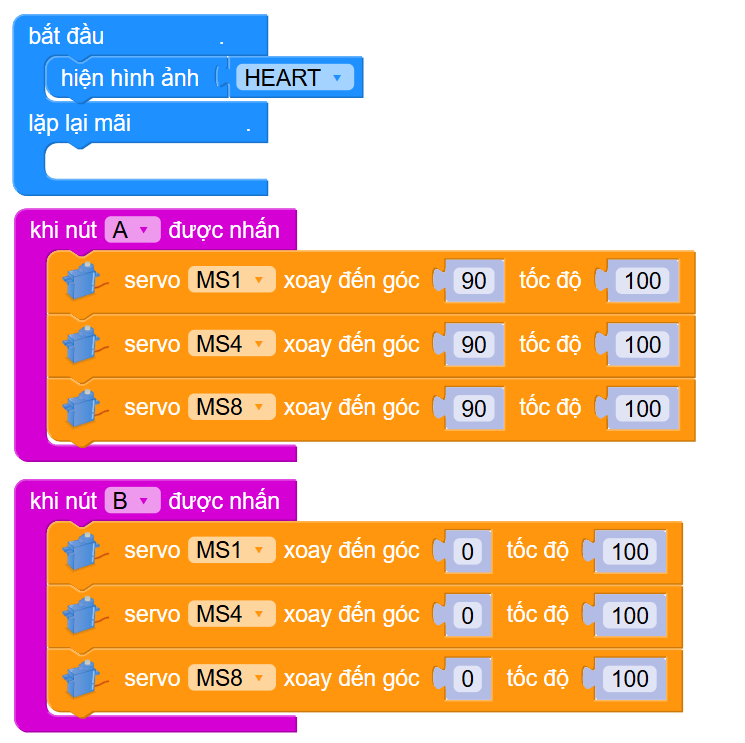
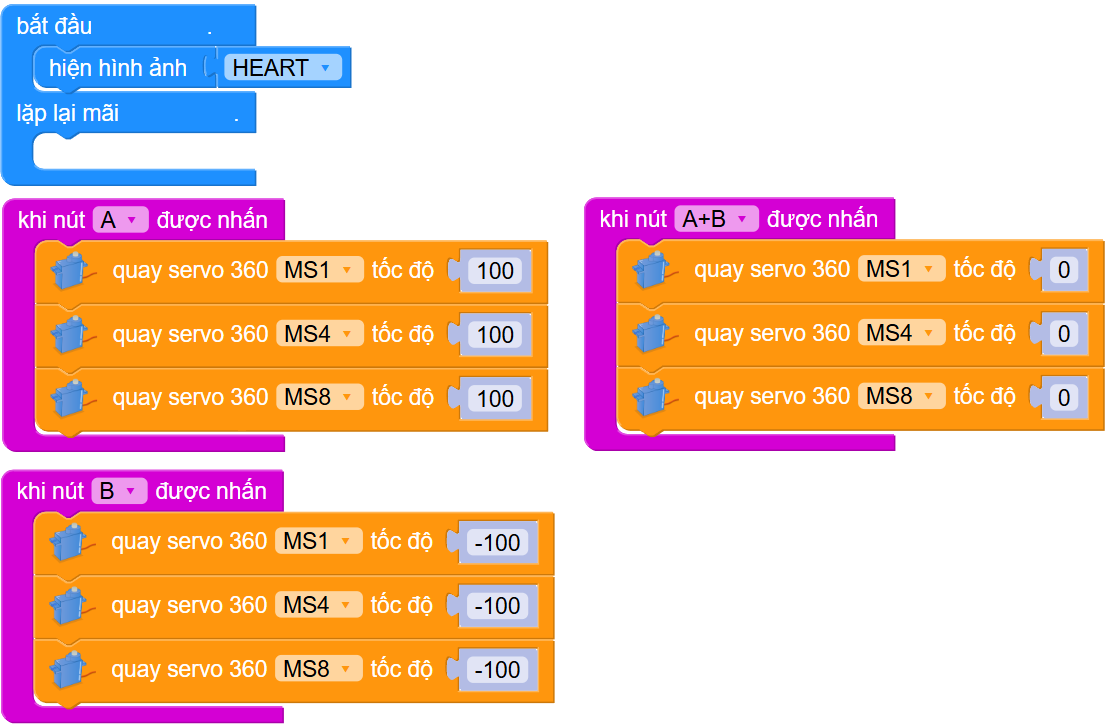
Khi nhấn nút A, cả 3 động cơ servo 180 độ sẽ quay đồng thời đến góc 90 độ với tốc độ 100. Ngược lại, khi nhấn nút B, các servo sẽ quay trở lại góc 0 độ cũng với tốc độ tương tự.
Dựa trên chương trình mẫu này, bạn hoàn toàn có thể điều khiển từng động cơ servo một cách độc lập, thiết lập góc quay và tốc độ phù hợp với từng nhiệm vụ cụ thể – chẳng hạn như đóng/mở cửa, điều khiển cánh tay robot, hay các chuyển động phức tạp khác trong mô hình của bạn.
2.2. Quay servo thêm một góc nhỏ
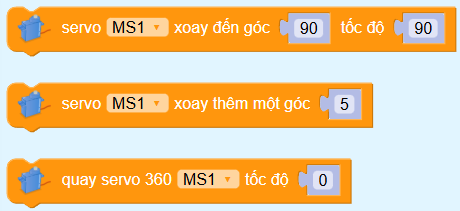
Khối lệnh điều khiển servo quay thêm một góc nhỏ tùy chỉnh để tăng độ chính xác trong quá trình thực hiện dự án:
Chương trình này chỉ phù hợp với servo 360 độ, người dùng cần lưu ý khi chọn servo để thực hiện. Việc kết nối vào các cổng của mạch lập trình được thực hiện tương tự như phần kết nối.
Câu lệnh điều khiển servo 360 độ:
Chương trình điều khiển tốc độ quay của servo 360 độ:
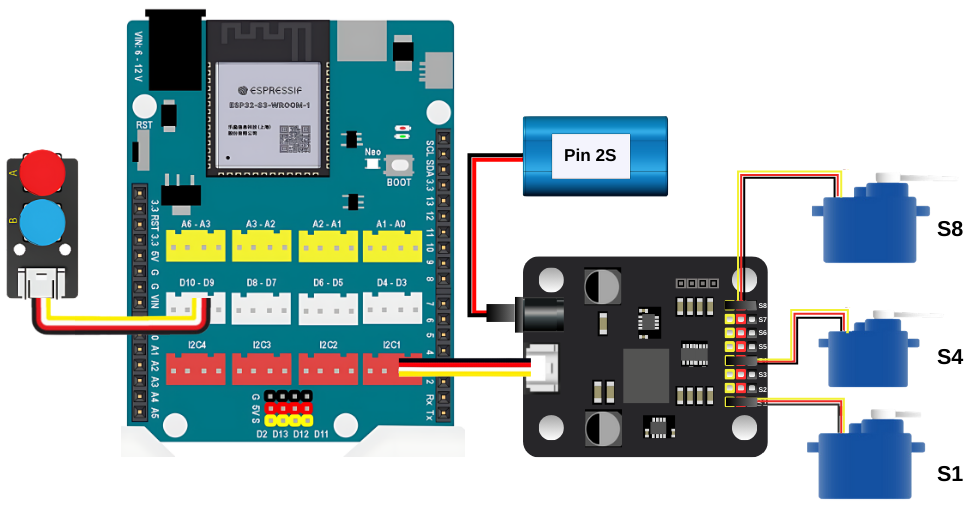
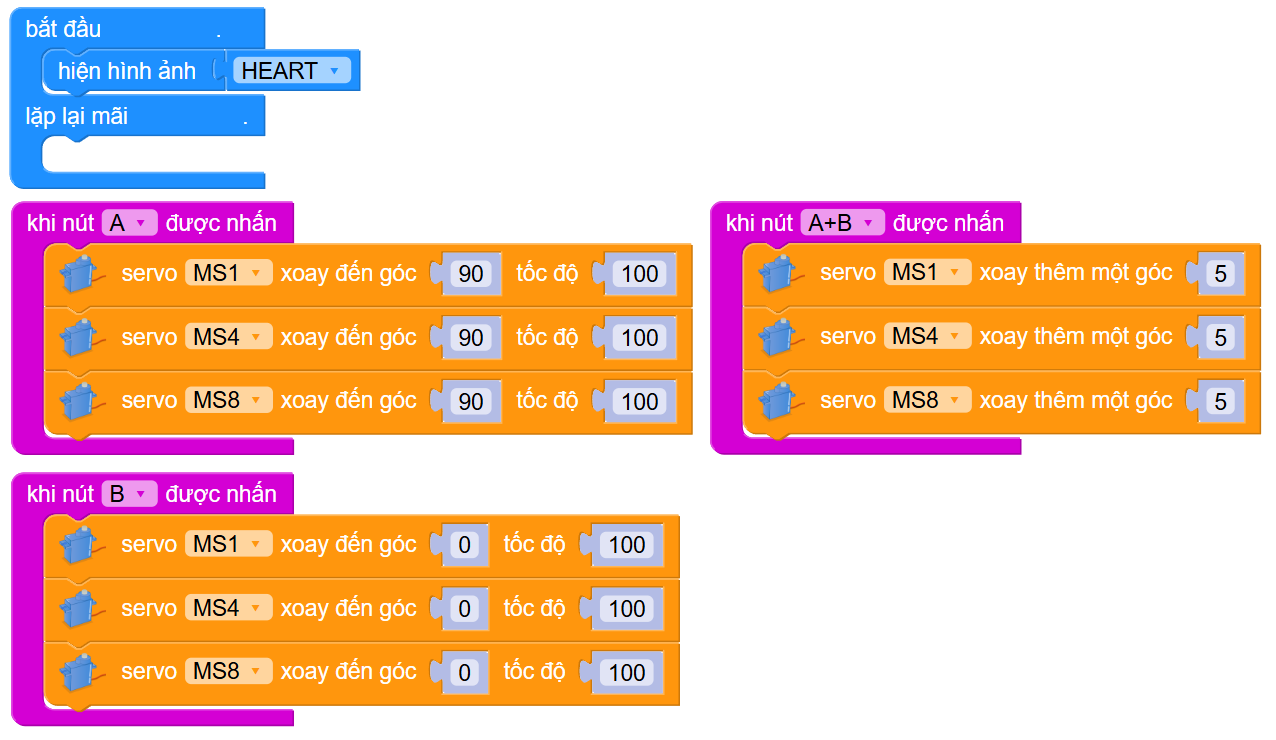
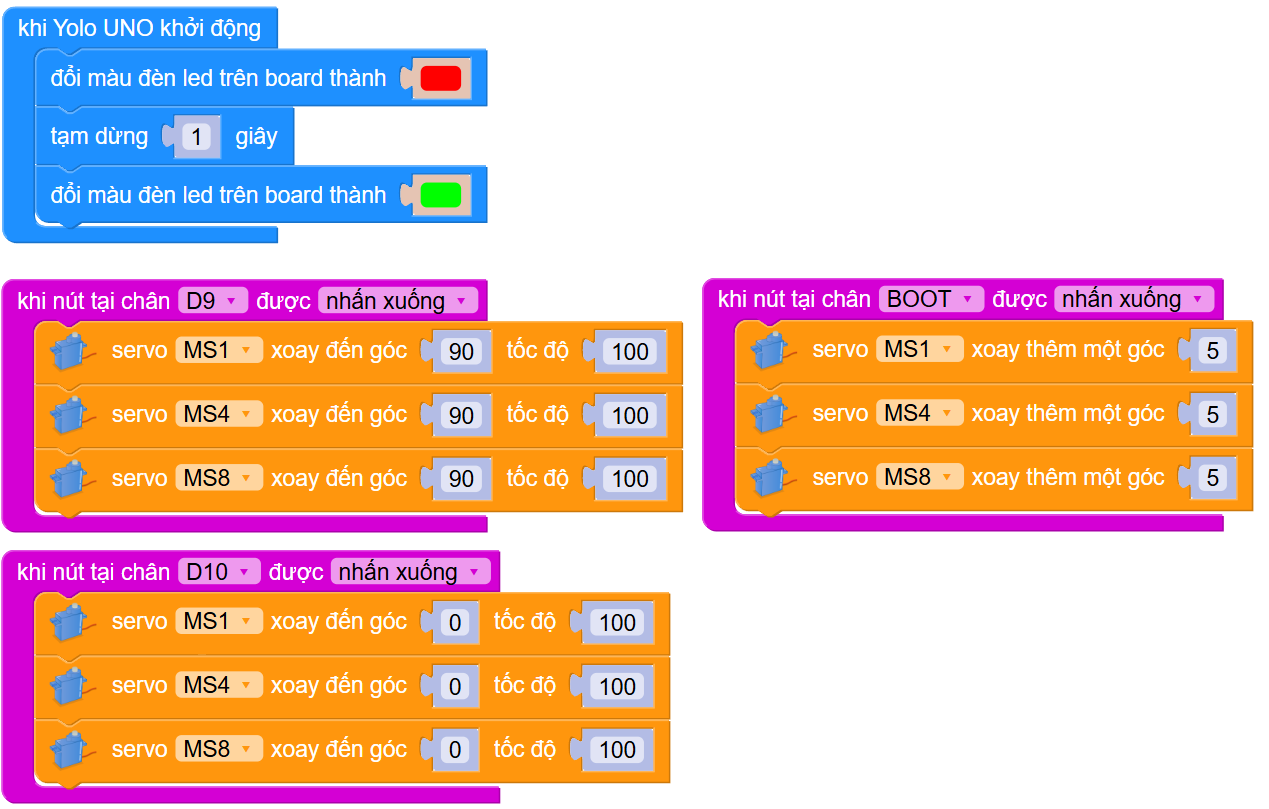
Khi nhấn nút A tại chân D9, cả 3 động cơ servo 180 độ sẽ quay đồng thời đến góc 90 độ với tốc độ 100. Ngược lại, khi nhấn nút B ở chân D10, các servo sẽ quay trở lại góc 0 độ cũng với tốc độ tương tự.
Dựa trên chương trình mẫu này, bạn hoàn toàn có thể điều khiển từng động cơ servo một cách độc lập, thiết lập góc quay và tốc độ phù hợp với từng nhiệm vụ cụ thể – chẳng hạn như đóng/mở cửa, điều khiển cánh tay robot, hay các chuyển động phức tạp khác trong mô hình của bạn.
2.2. Quay servo thêm một góc nhỏ
Khối lệnh điều khiển servo quay thêm một góc nhỏ tùy chỉnh để tăng độ chính xác trong quá trình thực hiện dự án:
Chương trình này chỉ phù hợp với servo 360 độ, người dùng cần lưu ý khi chọn servo để thực hiện. Việc kết nối vào các cổng của mạch lập trình được thực hiện tương tự như phần kết nối.
Câu lệnh điều khiển servo 360 độ:
Chương trình điều khiển tốc độ quay của servo 360 độ:
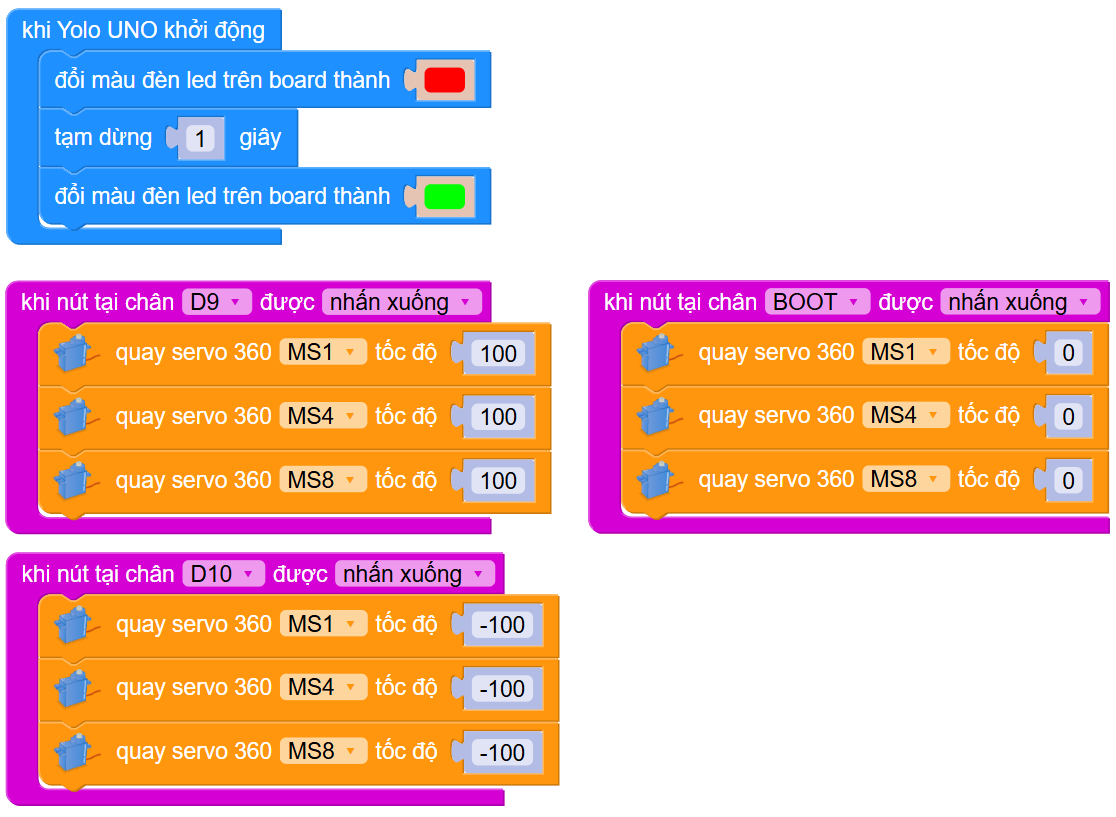
Khi nhấn nút A tại chân D9, servo 360 độ quay với tốc độ 100.
Khi nhấn nút B tại chân D10, servo quay lùi tốc độ 100.
Khi nút Boot trên Yolo UNO, servo dừng hoạt động.