2. 4. Robot di chuyển bị lệch, không quay được góc chính xác
Khi nạp chương trình , robot di chuyển tự động bị lệch nhiều, bạn hãy tham khảo cách sau đây để khắc phục.
- Nguyên nhân:
Do thiết lập tạo động cơ robot chưa khai báo cảm biến góc và di chuyển dùng cảm biến góc.
Đặt ORC Hub bị xiên, xéo làm cảm biến tính toán giá trị chưa đúng.
- Cách xử lý:
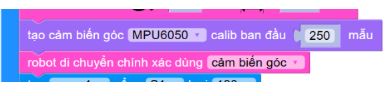
Bổ sung 2 khối lệnh này vào phía dưới câu lệnh tạo robot.
Lắp ORC Hub ngay ngắn lại trên robot.