2. 1. Lỗi mở link chương trình mẫu ra nhưng không thấy các khối lệnh
Khi mở link chương trình mẫu, trang lập trình đã hiện ra nhưng chương trình không hiển thị trên màn hình.
- Nguyên nhân:
Do lần đầu mở trang lập trình, chưa có các khối lệnh của robot
Đường liên kết chia sẻ bị sai (nên tô đen đường link rồi dán vào trình duyệt)
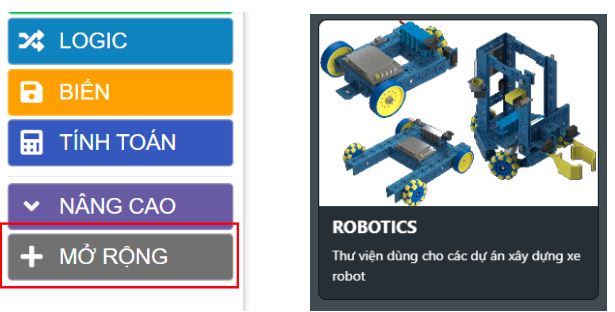
- Cách xử lý:
Thao tác tải thư viện Robotics từ mục MỞ RỘNG trong giao diện lập trình.
Sau khi đã tải thư viện thành công, tiến hành tải lại trang lập trình, chương trình sẽ hiện ra trên giao diện lập trình.