2. Hướng dẫn lắp ráp
1. Chỉnh góc cho servo
Trước khi tiến hành lắp ráp robot, chúng ta cần hiệu chỉnh góc servo của cánh tay và đầu gắp của robot về góc 0 độ. Đây là góc hạ cánh tay và mở đầu gắp.
Các bước thực hiện như sau:
Bước 1: Kết nối 2 servo với mạch điều khiển động cơ vào chân S1 và S2
Kết nối servo với Yolo UNO
Bước 2: Kết nối Yolo UNO với máy tính qua cổng USB

Kết nối Yolo UNO với máy tính
Bước 3: Truy cập vào https://app.ohstem.vn/, chọn thiết bị lập trình là Yolo UNO –> Lập trình –> Kết nối và tải thư viện ROBOTICS. Thực hiện thao tác như hình:
Kết nối và tải thư viện
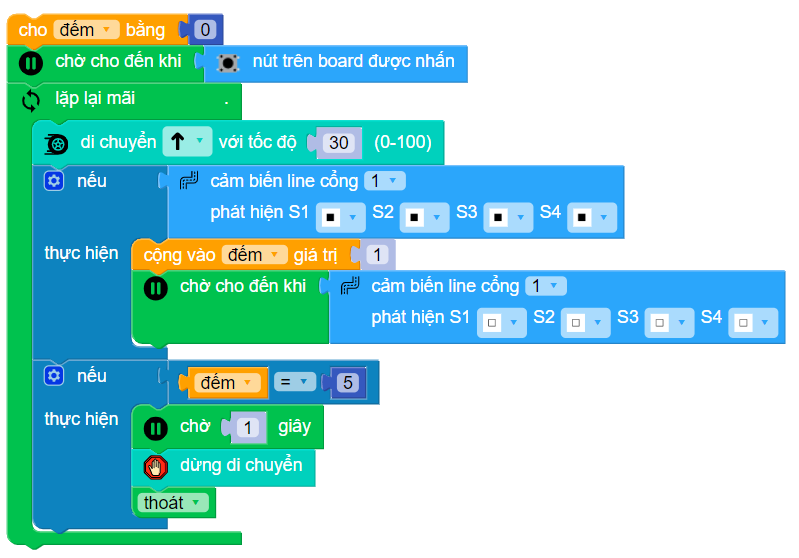
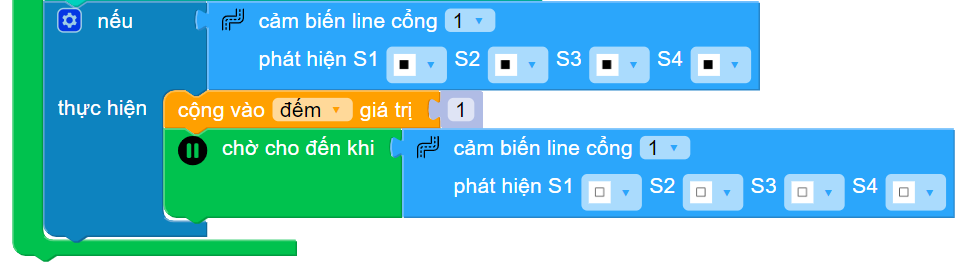
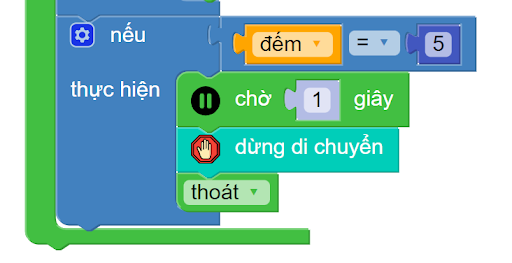
Bước 4: Thực hiện chương trình như sau:
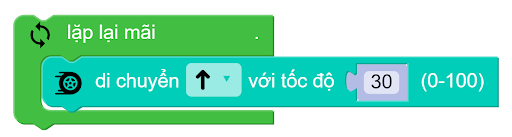
https://app.ohstem.vn/#!/share/yolouno/2gAUKQ2O8r1VrxOKc9CdZcoScqU
Bước 5: Gửi chương trình và nhấn nút Boot trên mạch Yolo UNO. Lúc này, servo sẽ quay đến góc 0 độ.
Gửi chương trình và nhấn nút Boot
Bước 6: Tiến hành lắp ráp robot
2. Lắp ráp robot
Xem hướng dẫn lắp ráp tại đây
3. Sơ đồ kết nối dây
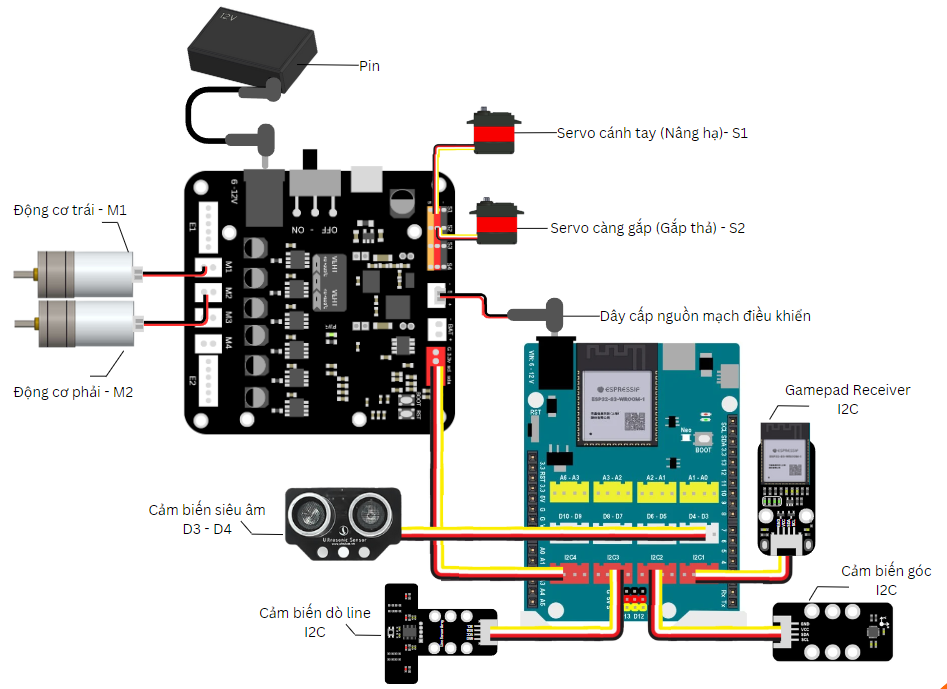
Sơ đồ kết nối dây