Cửa hàng
Máy tính lập trình Yolo:Bit
STEM STARTER KIT
AIoT Kit - Lập trình AI & IoT
Yolo UNO - Mạch lập trình Arduino
Robot STEM Rover
Robot Arm
Robot lập trình xBot
ORC Robot Kit
xBuild Creator Kit
Game Kit - Kit học lập trình game
Các module mở rộng
API thư viện
Sa bàn thi đấu
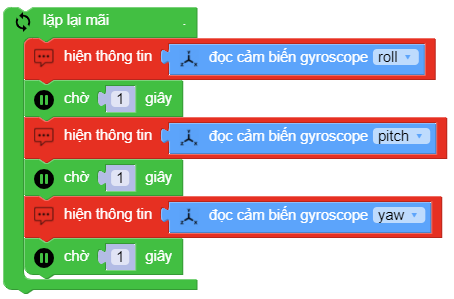
Trả về giá trị roll|pitch|yaw của cảm biến gyroscope. Tầm giá trị lý thuyết: -16 ~ 16
roll|pitch|yaw
-16 ~ 16